双足机器人起立方法:基于连杆机构的分析
PDF格式 | 259KB |
更新于2024-08-30
| 57 浏览量 | 举报
"本文主要分析了基于连杆机构的双足机器人起立方法,通过动作规划和稳定性条件的计算,确保机器人在起立过程中不会倾倒。文章首先介绍了双足机器人在工业电子和机器人学中的重要地位,接着详细探讨了机器人起立动作的关键性和挑战。在连杆模型部分,描述了一种具有多个自由度的双足步行机构,通过连杆结构简化问题,利用平面连杆理论进行分析。起立过程被划分为三个阶段,每个阶段都需要满足静态平衡条件,确保重心始终在支撑区域内。最后,通过实际验证证明了这种起立方法的有效性。"
双足机器人的起立动作是其行走的基础,它需要精确的动作规划和稳定的动态控制。本文关注的是如何运用连杆机构来解决这一问题。首先,文章强调了双足机器人在多学科交叉领域的关键作用,特别是它对技术和思维方式的推动。起立动作的实现不仅要求机器人能从俯卧状态转变为站立,而且要在过程中保持稳定,避免倾覆。
连杆模型的建立是分析双足机器人起立动作的关键步骤。文中提到的双足机器人模型拥有13个关节自由度,包括腿部、腰部和上肢的关节,这些关节的协同运动构成了起立动作的核心。通过D-H参数化方法,能够构建机器人的数学模型,为后续的动作规划提供依据。
起立过程的分析则分为三个阶段。每个阶段都有其特定的目标和约束条件,例如第一阶段可能是从俯卧到臀部离地,第二阶段可能涉及腿部的进一步伸展,第三阶段则是完成双足站立。在每个阶段,机器人的重心必须保持在支撑区域内,这需要对机器人的动态特性有深入理解,并精确计算各个关节的运动参数。
文章的实践验证部分展示了所提出的起立方法在实际操作中的可行性,证明了理论分析的准确性。这种方法为双足机器人设计提供了有价值的参考,对于推动工业电子领域中双足机器人的发展有着积极意义。
这篇论文深入探讨了基于连杆机构的双足机器人起立方法,为机器人控制和运动规划提供了新的思路,对于提升双足机器人的自主性和稳定性具有重要意义。
工业电子中的基于连杆机构的双足机器人起立方法分析工业电子中的基于连杆机构的双足机器人起立方法分析
摘要:双足机器人的起立动作是双足机器人步行之前重要的基本准备动作,本文通过连杆结 构分析一种双足机
器人的起立方法,主要分析了起立过程的动作规划,分阶段计算出使机器 人稳定不发生倾倒所要满足的各种条
件,最后实际验证了这一起立方法分析的正确性。 1 引言 机器人技术是电子、机械、人工智能等各个
领域新技术的结晶,双足机器人的研究作为 机器人学的一个分支,无疑对机器人研究的技术和思想提出了更高
的要求。 双足机器人的起立动作是双足机器人的基本动作之一,在双足机器人进行双足步行之 前,首先要保证
机器人处于站立状态。而从俯卧到站立的过程就是机器人的自起立的过程, 在这个过程中要保证机器人不发生
倾
摘要:双足机器人的起立动作是双足机器人步行之前重要的基本准备动作,本文通过连杆结 构分析一种双足机器人的起
立方法,主要分析了起立过程的动作规划,分阶段计算出使机器 人稳定不发生倾倒所要满足的各种条件,最后实际验证了这
一起立方法分析的正确性。
1 引言
机器人技术是电子、机械、人工智能等各个领域新技术的结晶,双足机器人的研究作为 机器人学的一个分支,无疑对机
器人研究的技术和思想提出了更高的要求。 双足机器人的起立动作是双足机器人的基本动作之一,在双足机器人进行双足步
行之 前,首先要保证机器人处于站立状态。而从俯卧到站立的过程就是机器人的自起立的过程, 在这个过程中要保证机器人
不发生倾倒,就需要规划机器人的整个动作。在这里我可以通过 将机器人简化为连杆结构。通过平面连杆的相关理论进行分
析,对整个动作进行规划。
2 连杆模型
本文的研究对象是一台至少具有13 关节自由度(不考虑手指的自由度)的双足步行机构, 每条腿各有3 个自由度, 即:踝关
节、膝关节、髋关节分别具有一个前向自由度;腰部有一 个转弯自由度;每个肩关节具有二个自由度, 包括前向和侧向度;每
个手臂的肘关节具有一 个前向自由度。机器人的起立规划运动,由三个旋转关节和八个前向关节的协调运动来实现, 由于起
立动作所涉及的自由度大都集中在侧向的平面内,所以可以用连杆机构来分析机器人 的起立动作,并用D-H 方法建立模型。
3 起立过程分析
起立过程主要是保证机器人从俯卧状态转换到双足站立的状态,并在起立过程中不发生 倾倒,那就要满足在静态运动时
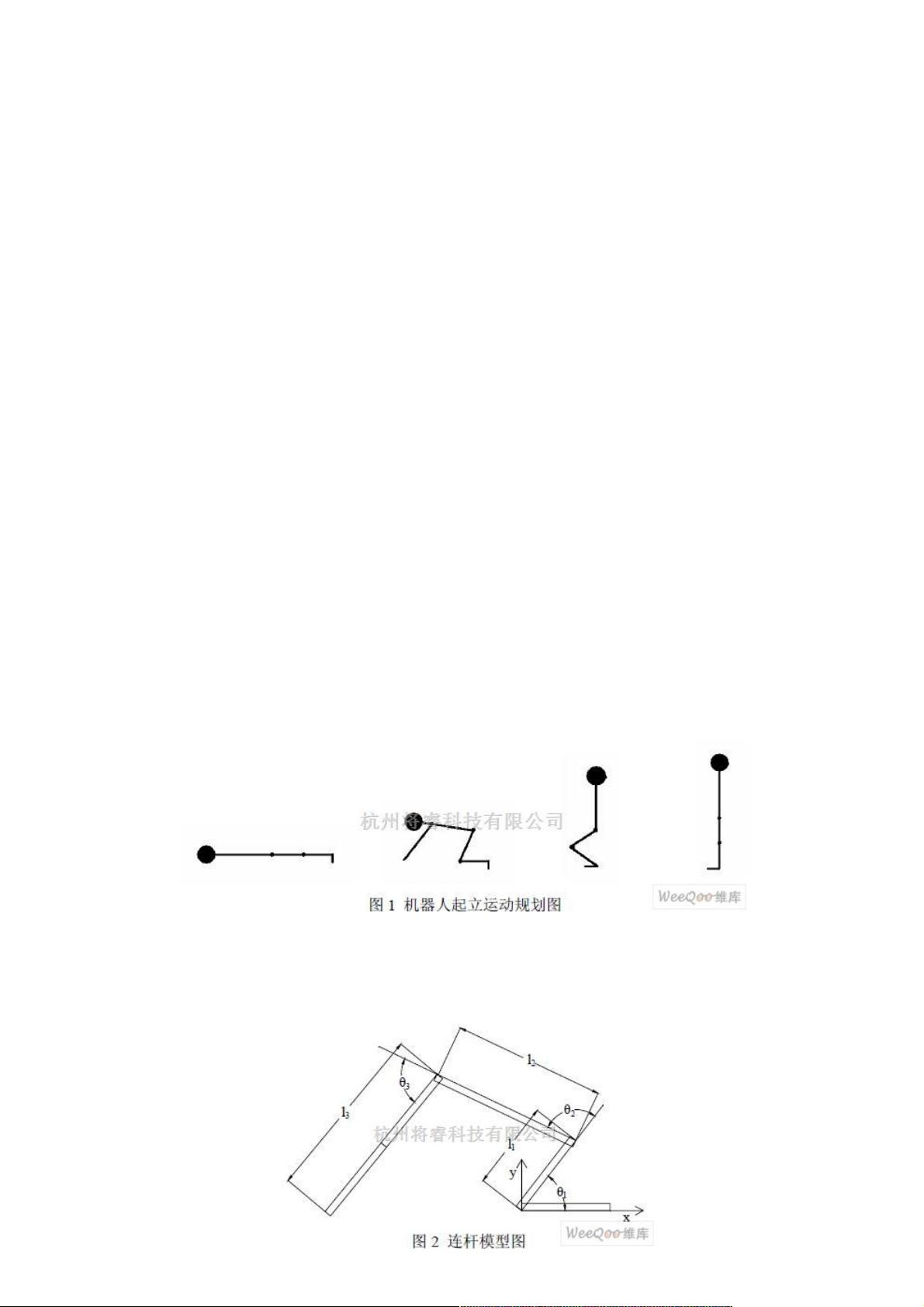
重心保持在机器人的支撑范围内。根据这一基本原理,可以 将起立过程分为三个阶段,如图1 所示,第一个阶段机器人从俯
卧状态开始,双腿开始弯曲 同时双臂向前伸直形成跪立状态。第二阶段机器人从跪立状态开始重心不断后移到双脚支撑 范围
内形成双脚支撑的下蹲状态。第三阶段从下蹲状态开始向上站立,直到双腿伸直形成直 立状态。在三个阶段中,第一个阶段
由于在双臂和双膝的支持下,只要保持双臂和双膝动作 一致就不会发生倾倒。而第二三阶段由于重心的不断移动则容易发生
倾倒,下面将具体分析。
3.1 第二阶段分析
在这个阶段,机器人要从跪立状态转换到下蹲状态,这里可以用连杆结构来分析。首先 建立连杆模型,如图2 所示。
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐




weixin_38717156
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机组成原理期末试题及答案(2011参考)
- 均值漂移算法深入解析及实践应用
- 掌握npm与yarn在React和pg库中的使用
- C++开发学生信息管理系统实现多功能查询
- 深入解析SIMATIC NET OPC服务器与PLC的S7连接技术
- 离心式水泵原理与Matlab仿真教程
- 实现JS星级评论打分与滑动提示效果
- VB.NET图书馆管理系统源码及程序发布
- C#实现程序A监控与自动启动机制
- 构建简易Android拨号功能的应用开发教程
- HTML技术在在线杂志中的应用
- 网页开发中的实用树形菜单插件应用
- 高压水清洗技术在储罐维修中的关键应用
- 流量计校正方法及操作指南
- WinCE系统下SD卡磁盘性能测试工具及代码解析
- ASP.NET学生管理系统的源码与数据库教程
