深入理解OpenCV相机标定技术
3 浏览量
更新于2024-09-03
收藏 256KB PDF 举报
"本文主要探讨了OpenCV中的相机标定过程,旨在解释如何获取相机参数,包括内参数矩阵、投影矩阵、旋转矩阵和位移矩阵等。文章通过介绍相机的成像原理,详细阐述了针孔相机模型,并讨论了相机标定的数学基础,为读者提供了理解相机标定的理论背景和实际应用中的意义。"
在计算机视觉领域,OpenCV是一个强大的库,广泛用于图像处理和计算机视觉任务。其中,相机标定是一项关键技术,它允许我们获取相机的内在特性,这些特性对于精确地将三维世界映射到二维图像至关重要。相机参数主要包括内参数矩阵(包含了焦距、主点坐标等信息)、投影矩阵、旋转矩阵和平移矩阵,它们描述了相机的几何特性以及相机坐标系与图像坐标系之间的转换关系。
相机成像原理通常基于针孔相机模型,该模型假设光通过一个极小的孔径进入,形成倒立的实像。在理想情况下,如果图像传感器放置在镜头焦距处,物体会在其上形成清晰的倒影。实际相机中,为了得到正立的图像,会有一个光学系统将倒置的图像翻转。在这个简化模型中,物体的高度hi与其在图像上的高度hi成反比,即hi = f * h0 / d0,这为我们提供了将三维空间中的点映射到二维图像的基本公式。
相机标定的过程通常涉及到使用已知几何形状的物体(如棋盘格)作为参考,通过捕捉多个不同角度的图像来计算相机参数。OpenCV库提供了一套完整的算法来自动化这个过程,包括特征检测、匹配、几何校正和参数估计等步骤。通过这种方法,可以求解出相机的内参数矩阵K、旋转矩阵R和位移向量t,这些参数对于进行诸如立体视觉、目标跟踪、3D重建等任务是必不可少的。
在实际应用中,相机标定对于提高计算机视觉系统的精度至关重要。例如,在自动驾驶汽车中,精确的相机标定可以帮助车辆正确识别道路标志和障碍物;在机器人导航中,它有助于将摄像头捕获的图像转化为机器人的周围环境地图。因此,理解并掌握相机标定的原理和方法对于任何涉及相机的计算机视觉项目都具有重要的实际价值。
聊一聊聊一聊OpenCV相机标定相机标定
主要为大家详细介绍了OpenCV相机标定的相关资料,即获得相机参数的过程,具有一定的参考价值,感兴趣的
小伙伴们可以参考一下
相机标定:简单的说,就是获得相机参数的过程。参数如:相机内参数矩阵,投影矩阵,旋转矩阵和平移矩阵等相机标定:简单的说,就是获得相机参数的过程。参数如:相机内参数矩阵,投影矩阵,旋转矩阵和平移矩阵等
什么叫相机参数?什么叫相机参数?
简单的说,将现实世界中的人、物,拍成一张图像(二维)。人或物在世界中的三维坐标,和图像上对应的二维坐标间的关
系。表达两种不同维度坐标间的关系用啥表示?用相机参数。
相机的成像原理相机的成像原理
先来看一下,相机的成像原理:
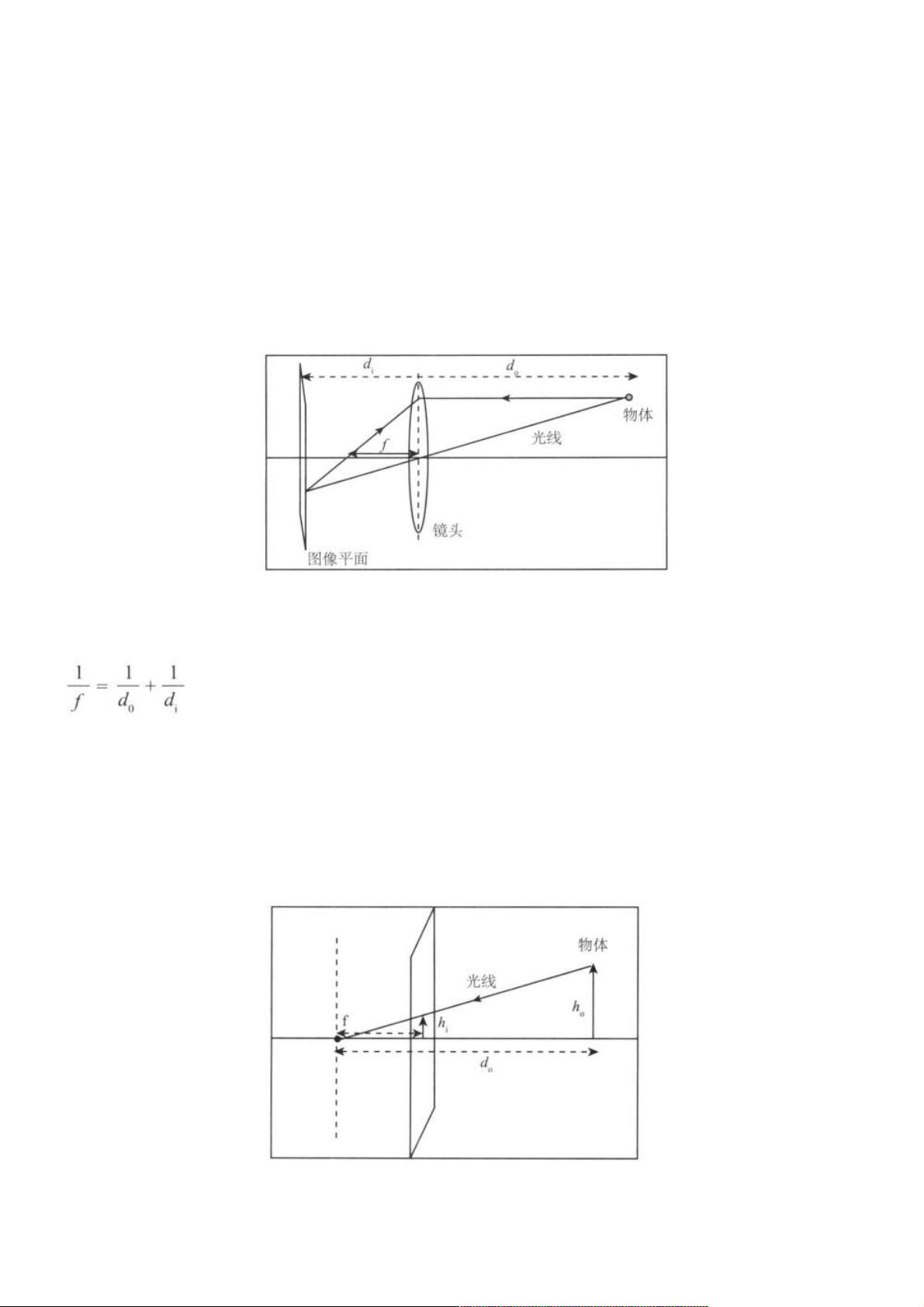
如图所示,这是一个相机模型。将物体简化看成一个点。来自物体的光,通过镜头,击中图像平面(图像传感器),以此成
像。d0是物体到镜头的距离,di时镜头到图像平面的距离,f是镜头的焦距。三者满足以下关系。
现在,简化上面的相机模型。现在,简化上面的相机模型。
将相机孔径看成无穷小,只考虑中心位置的射线,这样就忽视了透镜的影响。然后由于d0远远大于di,将图像平面放在焦距
处,这样物体在图像平面上成像为倒立的影像(没有透镜的影响,只考虑从中心的孔径进入的光线)。这个简化的模型就是针
孔摄像机模型。然后,我们在镜头前,将图像平面放在焦距距离的位置,就可以简单获得一个笔直的图像(不倒立)。当然,
这只是理论上的,你不可能将图像传感器从相机里拿出来,放在镜头前面。实际应用中,针孔摄像机应该是将成像后的图像倒
过来,以获得正立的图像。
到此,我们获得了一个简化的模型,如下图:
h0是物体的高,hi是图像上物体的高,f是焦距(距离),d0是图像到镜头的距离。四者满足如下关系:
下载后可阅读完整内容,剩余5页未读,立即下载
2020-12-01 上传
2022-09-24 上传
2021-10-02 上传
2022-07-15 上传
2021-10-03 上传
2018-05-17 上传
2022-07-14 上传
2022-09-19 上传

weixin_38744962
- 粉丝: 9
- 资源: 968
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
