"六自由度工业机器人运动学标定设计及参数辨识方法研究"
版权申诉
26 浏览量
更新于2024-03-02
收藏 1.48MB DOC 举报
本文介绍了运动学标定在提高机器人定位精度中的重要性,以及针对工业机器人标定问题所采用的一种运动学标定方法。运动学标定是提高机器人精度的关键技术,也是机器人学的重要内容,具有重要的理论和现实意义。现今机器人厂家生产的机器人其重复定位精度比较高,而绝对定位精度却很低,这已成为提高机器人绝对定位精度的关键技术问题。本文采用了先进的激光跟踪测量系统和基于模型的参数辨识方法,成功识别出一种 6R 机器人模型的准确参数,并提高了该机器人的绝对定位精度。
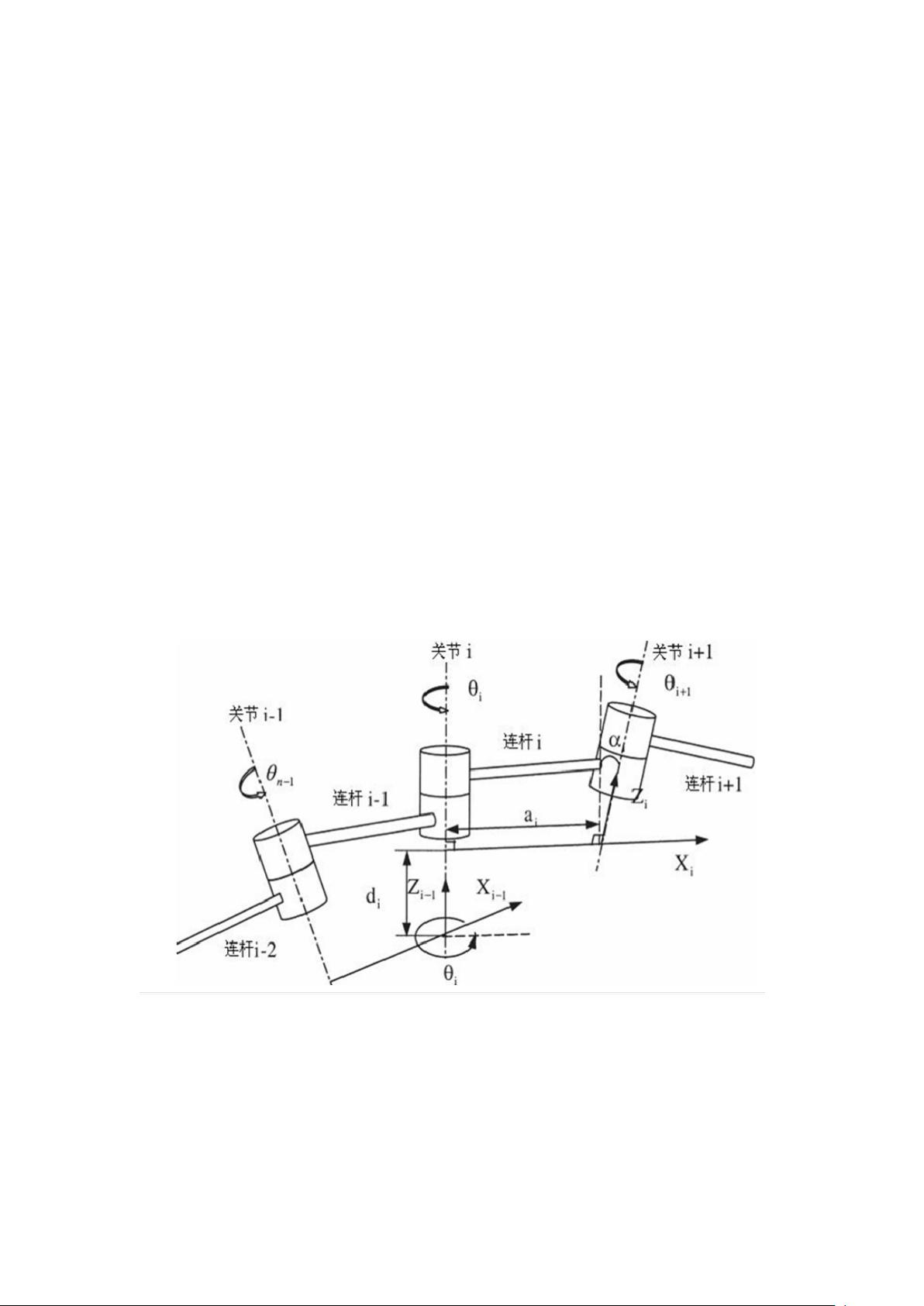
针对工业机器人标定问题,本文首先结合机器人的实际机构特点,运用 D-H 方法建立了机器人的连杆坐标系,并进行了机器人运动学正逆解和雅可比矩阵的详细推导及求解。然后,运用 Matlab 语言进行运动学模型的编程求解,并通过与机器人控制器中位姿数据对比,验证了所建立的连杆坐标系统的正确性。接着,本文分析了影响机器人末端绝对定位精度的误差来源,采用修正的运动学连杆参数模型,基于微分变换法推导了用于机器人标定的误差模型,并基于 Matlab 软件系统编制了机器人标定算法。
通过本文的研究,成功采用先进的激光跟踪测量系统和基于模型的参数辨识方法,识别出一种 6R 机器人模型的准确参数,提高了该机器人的绝对定位精度。同时,结合机器人的实际机构特点,运用 D-H 方法建立了机器人的连杆坐标系,并进行了机器人运动学正逆解和雅可比矩阵的详细推导及求解。分析了影响机器人末端绝对定位精度的误差来源,并采用修正的运动学连杆参数模型,成功推导了用于机器人标定的误差模型。最后,通过 Matlab 软件系统编制了机器人标定算法,为提高工业机器人绝对定位精度提供了重要的理论和技术支持。
综上所述,本文提供了一种有效的工业机器人运动学标定方法,为提高机器人绝对定位精度提供了重要的理论和技术支持。本文所采用的方法和算法可以在实际工业生产中得到广泛应用,对于提高工业机器人的定位精度具有重要的实际意义。相信随着该方法的推广和应用,将会为工业机器人的发展做出积极的贡献。
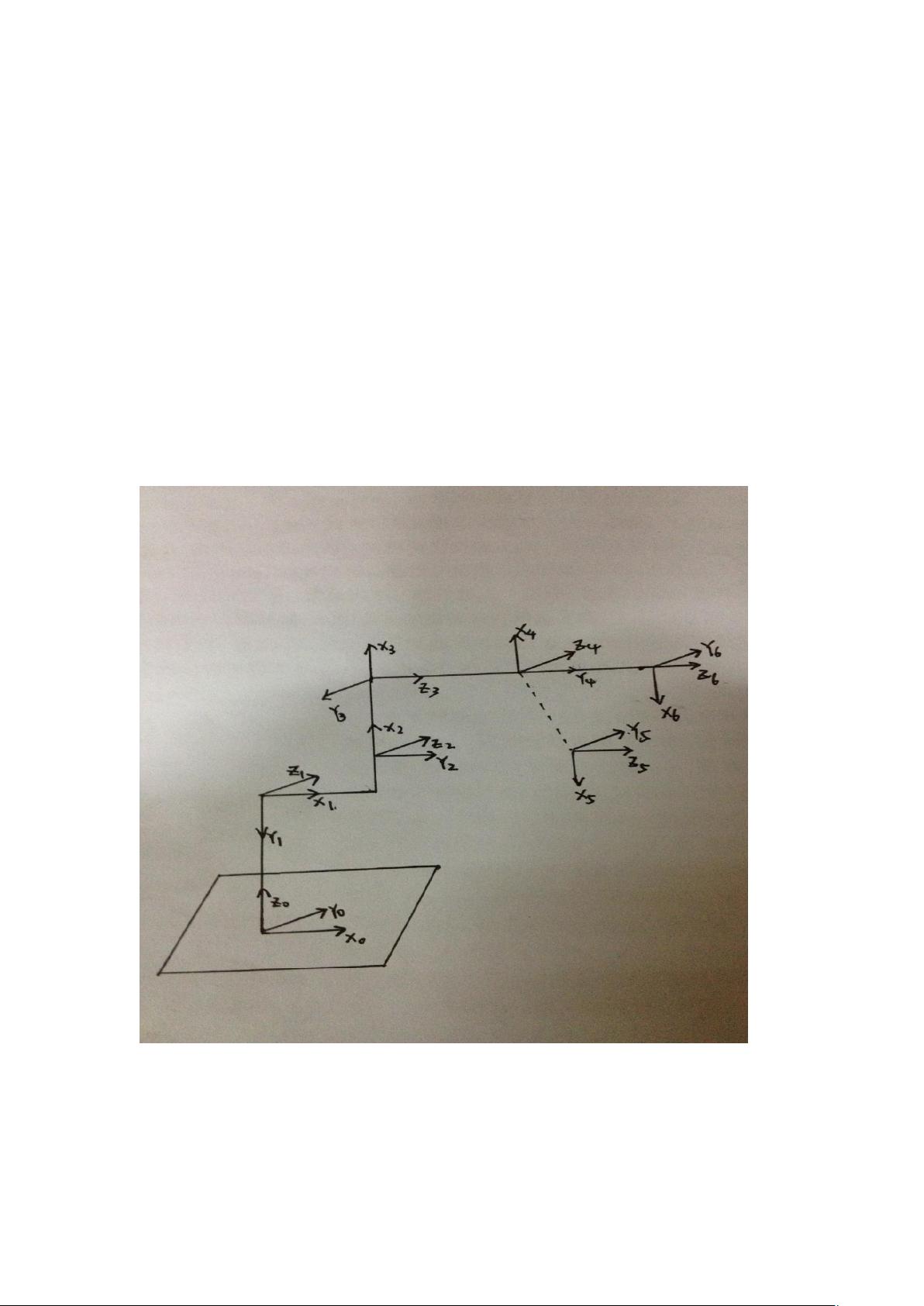
这里要说明的是:
1.当 Z
i-1
轴与 Z
i
轴重合时,(这时 O
i
=O
i-1
)选取 X
i
轴满足在初始条件
位置时,X
i
轴与 X
i-1
轴重合。
2.当 Z
i-1
轴与 Z
i
轴相交且不重合时,选择 X
i
=±(Z
i-1
×Z
i
,通常使所
有平行的 X 轴均有相同的指向。
3.当 i=0 时,由上所述知,这时 O
0
=0,或 O
0
在 Z
0
轴与 Z
1
轴的公法线上,
选取在初始位置时 X
0
轴与 X
1
轴重合。
第四步:确定各坐标系的 y 轴
基本原则是:使 y
i
= z
i
×x
i
,即构成右手坐标系。
这 样 , 便 能 建 立 起 如 图 2-1 所 示 的 坐 标 系 分 布 。
图 2-1 D-H 模型坐标系分布示意图
一旦对全部连杆规定坐标系之后,就能够确定用于指示系 i-1 和系 i
间相对位置和方位的 4 个参数。
剩余53页未读,继续阅读
2023-07-11 上传
2022-06-30 上传
2023-07-12 上传
2023-07-11 上传
2023-09-07 上传
2023-07-13 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
