
(8)
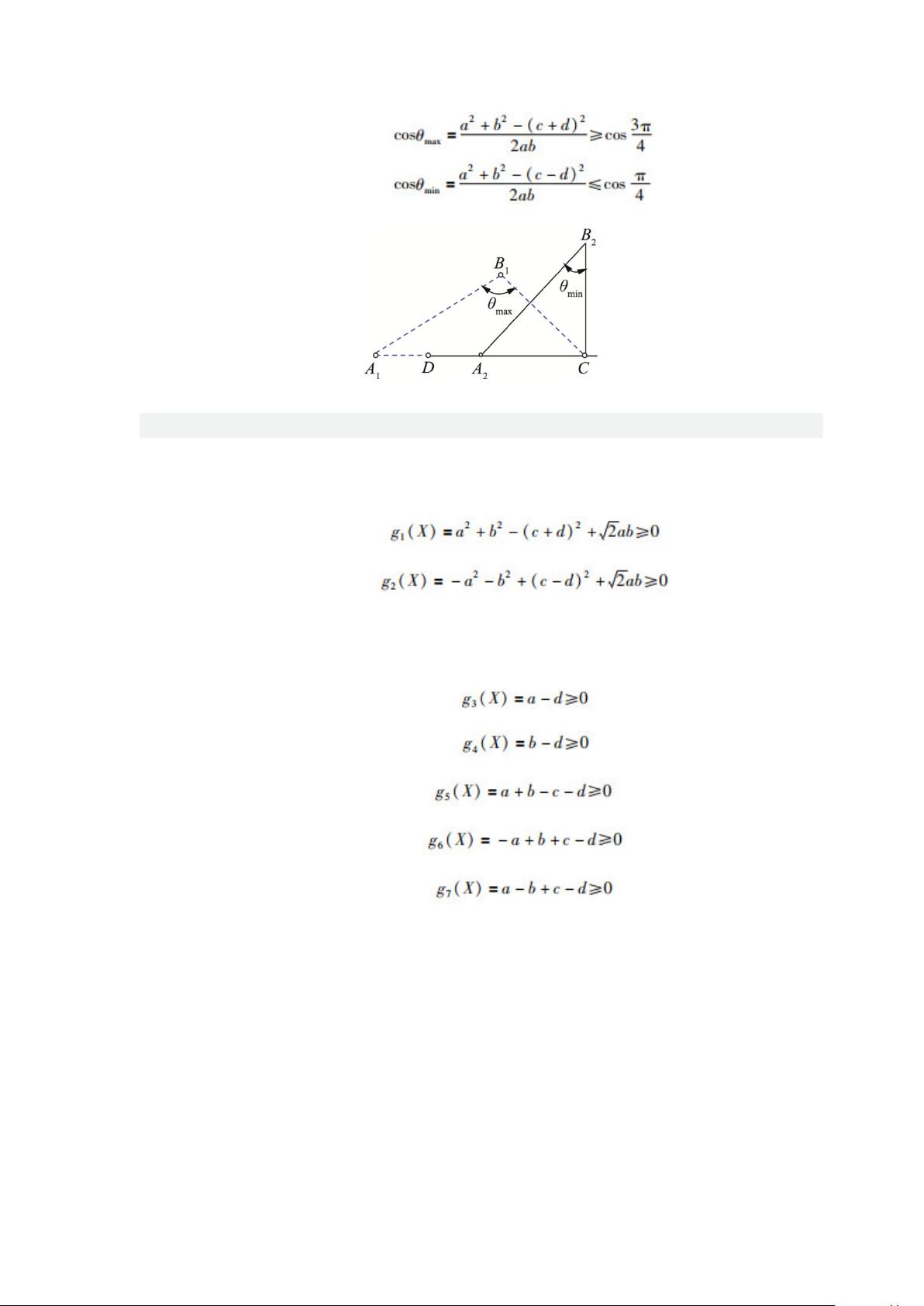
图 3 传动角极限位置 Fig.3 Limit position of transmission angle
图选项
得到传动角对应的约束方程为
(9)
(10)
根据机械原理,四杆长度还应满足式(11)~式(15)的约束条件.
(11)
(12)
(13)
(14)
(15)
2 鸟群算法 2.1 鸟群算法
鸟群算法是一种从生物进化总结而来的仿生优化算法. 根据鸟群的觅食、防御、飞行等行为进行模
拟,可以总结出 5 条进化规则
[1]
:
1) 每只鸟可以随机地在防御和觅食行为之间自由转换.
2) 每只鸟在觅食过程中记录并更新关于食物的自身最优信息和种群最优信息. 这些信息被用于寻找
新的食物源. 同时整个种群都可共享这些社会信息.
剩余15页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4137
- 资源: 1万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







