探索四元数与三维旋转的直观几何关联
需积分: 35 190 浏览量
更新于2024-07-15
收藏 439KB PDF 举报
本文主要探讨了三维旋转与四元数之间的联系,特别是针对计算机图形学和工程领域中对这种数学工具在处理三维空间变换的应用。四元数是一种扩展的复数形式,用于表示三维空间中的旋转,相比于传统的旋转矩阵,它具有更高的效率和便利性。
首先,文章从复数的基本概念出发,指出复数可以表示为实部和虚部的组合,且虚数单位满足\( i^2 = -1 \)。通过将复数看作是向量在特定基(Basis)上的线性组合,作者引入复数与二维旋转的关联,为理解四元数奠定了基础。四元数实际上是复数的扩展,由四个实数构成,包含了一个额外的虚数分量,使得它可以同时表示三维空间中的三个旋转轴和一个旋转角度。
在介绍四元数时,作者强调许多四元数的性质与复数相似,这有助于读者通过已有的复数知识来逐步掌握四元数。四元数的表示形式通常为 \( q = w + xi + yj + zk \),其中 \( w \) 是实部,而 \( x, y, z \) 分别对应三个旋转轴上的分量,其乘法规则与复数不同,但直观上反映了旋转的组合特性。
文章指出,四元数与三维旋转的关系可以通过几何方法和线性代数进行直观理解,而不是完全依赖于抽象的代数表达。这对于实际工程应用来说更为实用,例如在飞行控制(飞控)中,四元数常用于高效地表示和计算飞行器的姿态变化。
作者还分享了自己编写的MATLAB/Octave代码示例和相关的GitHub链接,供读者进行实践和验证。此外,他还提醒读者,尽管文章主要关注几何和应用层面,对于那些更侧重理论背景的读者,文章可能不是最佳选择,但最后的拓展阅读部分可能会提供一些参考价值。
文章在撰写过程中可能存在一些错误,作者鼓励读者提出反馈,以便不断改进。同时,作者声明了文章的版权信息,希望在共享和引用时遵循相应的许可协议,且避免商业用途。
这篇文档为初学者和专业人士提供了一个简明易懂的桥梁,帮助他们理解四元数如何与三维旋转无缝结合,特别是在计算机图形学和工程实践中如何有效地利用这一工具。
注意,在这篇教程中我们将使用右手坐标系统,并且我们将使用右手定则
来定义旋转的正方向.你可以将右手拇指指向旋转轴 u 的正方向,这时其它
四个手指弯曲的方向即为旋转的正方向.在上图中即为逆时针方向.对于左
手坐标系情况的讨论请见第 9 章.
在轴角的表示方法中,一个旋转的定义需要使用到四个变量:旋转轴 u 的
𝑥, 𝑦, 𝑧 坐标,以及一个旋转角 θ,也就是我们一共有四个自由度 (Degree of
Freedom).这很明显是多于欧拉角的三个自由度的.实际上,任何三维中的旋
转只需要三个自由度就可以定义了,为什么这里我们会多出一个自由度呢?
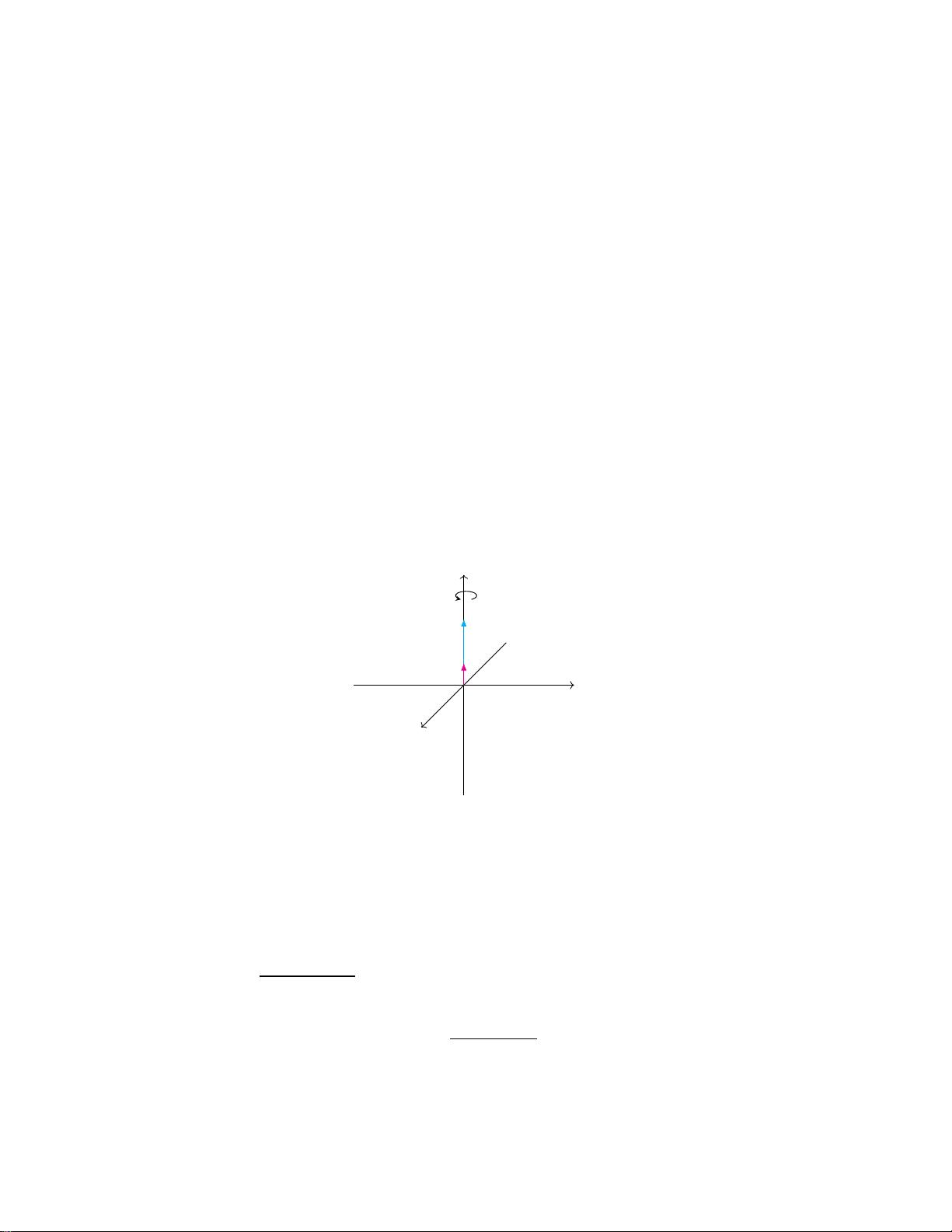
其实,在我们定义旋转轴 u 的 𝑥, 𝑦, 𝑧 坐标的同时,我们就定义了 u 的模
长(长度).然而,通常情况下,如果我们说绕着一个向量 u 旋转,我们其实
指的是绕着 u 所指的方向进行旋转.回忆一下向量的定义:向量是同时具有
大小和方向的量,但是在这里它的大小(长度)并不重要.我们可以说绕着
u
1
= (0, 0, 1)
𝑇
这个轴进行旋转,也可以说绕着 u
2
= (0, 0, 3)
𝑇
旋转.虽然这
两个向量完全不同,但是它们指向的都是同一个方向(即 𝑧 轴的方向):
𝑦
𝑧
𝑥
u
2
u
1
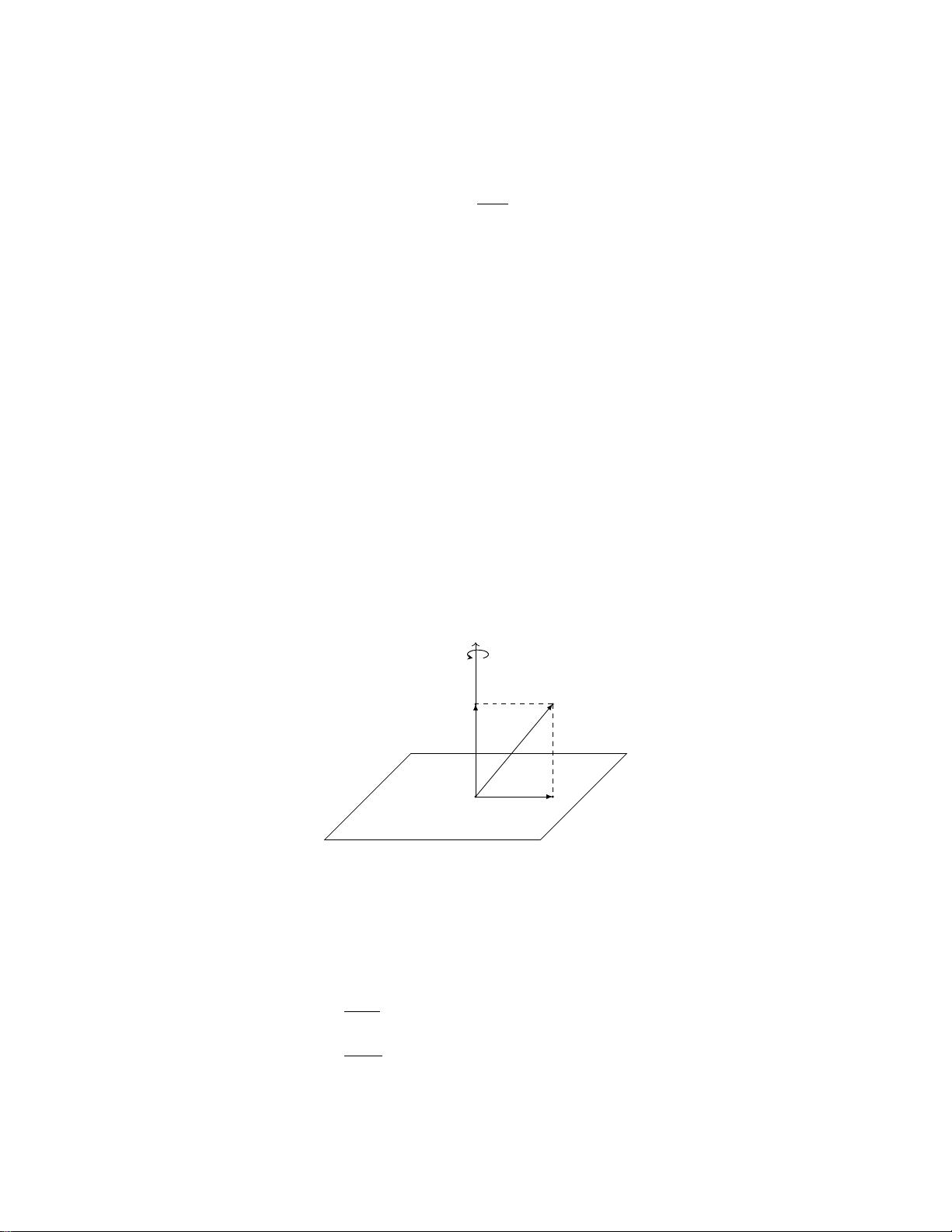
在三维空间中定义一个方向只需要用到两个量就可以了(与任意两个坐标
轴之间的夹角).最简单的例子就是地球的经纬度,我们仅仅使用经度和纬
度两个自由度就可以定义地球上任意一个方位.而如果我们要表示某一个方
位上的特定一个点,则还需要添加海拔这个自由度.
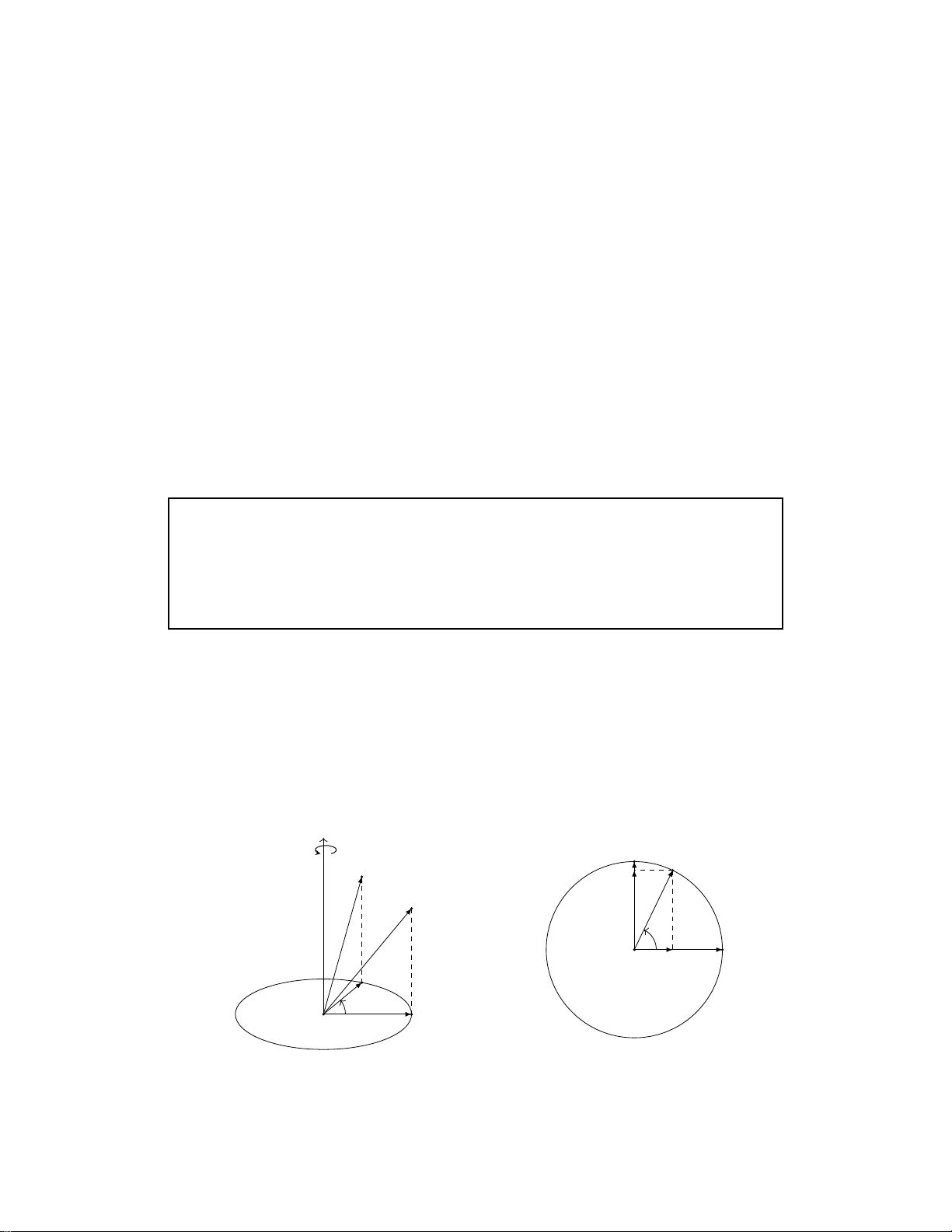
为了消除旋转轴 u 模长这个多余的自由度,我们可以规定旋转轴 u 的模长
为 ∥u∥ =
p
𝑥
2
+ 𝑦
2
+ 𝑧
2
= 1,也就是说 u 是一个单位向量.这样子一来,只
要给出 u 的任意两个坐标,我们都能求出第三个坐标.比如,我们规定了 u
的 𝑥, 𝑧 坐标,那么就能得到 𝑦 =
√
1 − 𝑥
2
− 𝑧
2
.我们其实可以将模长规定为
任意的常量,但是规定 ∥u∥ = 1 能为我们之后的推导带来很多的便利,这也
是数学和物理中对方向定义的惯例.
12
剩余72页未读,继续阅读
263 浏览量
170 浏览量
211 浏览量
182 浏览量
620 浏览量
339 浏览量
809 浏览量

mrVillain
- 粉丝: 67
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- ImageAnnotation:有关如何使用Photoshop提取视频帧和注释图像的教程。 提供了两个脚本来计算每个类别的覆盖率和图像大小(R和Matlab)
- mixchar:R包“ mixchar”的存储库
- MFCApplication1.rar
- 在安卓上使用的app例程
- test01:这只是一个git测试库。 测试Git及其功能
- MFC自定义按钮实现
- part_2a_decoding_with_loops.zip
- 行业文档-设计装置-一种具有储水功能的花盆.zip
- EVERSON
- 个人偏好:这些是我使用的所有东西,可能会忘记的事情。 所以我把它们都收集在这里。 这可能对您有用:)
- 验证码训练、识别数据集,共1070个验证码图片
- 华科网络内容管理系统 v5.3 手机+PC
- SSM整合jar包
- matlab确定眼睛的代码-BME3053C-final-project:实验大鼠鬼脸秤的机器识别
- Naga-Phaneendra.Ghantasala_152681_phase2
- 行业文档-设计装置-一种平台升降装置.zip
