通俗解读:四元数与三维旋转的直观联系
需积分: 9 101 浏览量
更新于2024-07-16
收藏 433KB PDF 举报
本文是一篇深入浅出地讲解四元数(Quaternion)与三维旋转之间关系的文章,作者Krasjet针对网络上常见资料的抽象性和某些模糊点进行补充,力求提供直观易懂的解释。文章首先回顾了复数的基本概念,强调了复数与二维旋转的联系,作为理解四元数的桥梁。复数被表示为z = a + bi的形式,其中a是实部,b是虚部,可以看作是{1, i}基底下的线性组合,也可以用向量形式表示。
接下来,文章将重点转向四元数,这是一种扩展的复数系统,具有四个分量,用于在三维空间中描述旋转。四元数不仅保留了复数的一些基本性质,如乘法运算规则,还引入了一个新的分量w,使得它们能够自然地处理三维空间中的旋转问题,避免了使用角度和旋转矩阵可能带来的精度损失。四元数与三维旋转的关系可通过几何直觉和线性代数原理进行推导,特别是通过分解旋转到各个轴上的旋转变换,展现了其在计算机图形学中的优势。
尽管文章主要关注几何和实际应用,但对于希望深入了解抽象数学理论的读者,文中也提到了一些高级概念的简要概述,但这些并非主要内容。此外,作者分享了自己编写的相关MATLAB/Octave代码示例和GitHub链接,供读者实践和参考。文章的撰写者提醒读者,由于时间匆忙可能存在错误,欢迎读者指出并在GitHub Issues中提出反馈。
最后,文章遵循Creative Commons BY-NC-SA 4.0协议,要求在引用和分享时保持署名和协议一致,并且禁止商业使用。整体而言,这是一篇实用且易于理解的四元数与三维旋转教程,对于从事图形学、物理或工程领域的专业人士以及对学习四元数感兴趣的学生来说,是一份宝贵的资源。
注意,在这篇教程中我们将使用右手坐标系统,并且我们将使用右手定则来定义旋
转的正方向.你可以将右手拇指指向旋转轴 u 的正方向,这时其它四个手指弯曲的
方向即为旋转的正方向.在上图中即为逆时针方向.对于左手坐标系情况的讨论请
见第 9 章.
在轴角的表示方法中,一个旋转的定义需要使用到四个变量:旋转轴 u 的 x, y, z 坐
标,以及一个旋转角 θ,也就是我们一共有四个自由度 (Degree of Freedom).这很明显
是多于欧拉角的三个自由度的.实际上,任何三维中的旋转只需要三个自由度就可
以定义了,为什么这里我们会多出一个自由度呢?
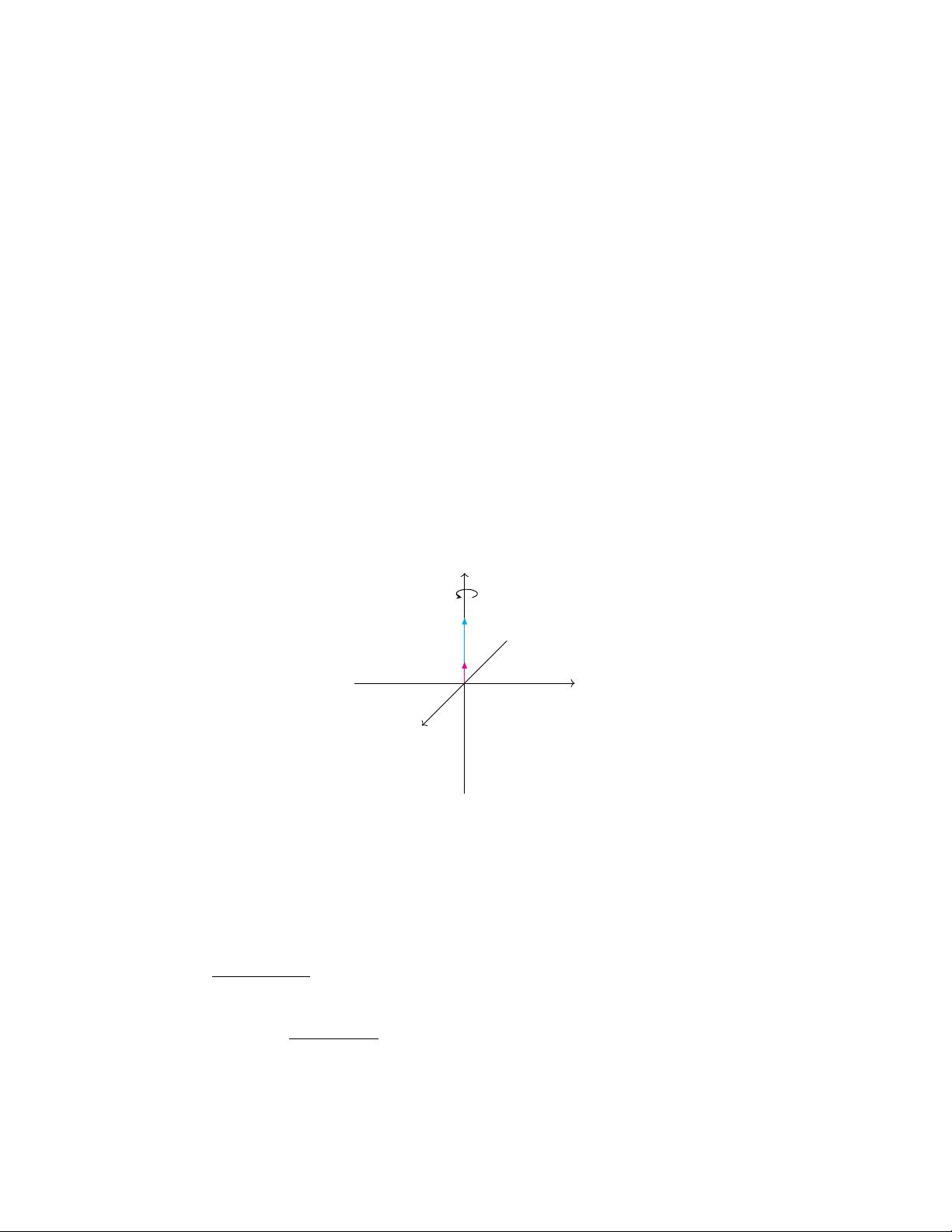
其实,在我们定义旋转轴 u 的 x, y, z 坐标的同时,我们就定义了 u 的模长(长度).
然而,通常情况下,如果我们说绕着一个向量 u 旋转,我们其实指的是绕着 u 所指
的方向进行旋转.回忆一下向量的定义:向量是同时具有大小和方向的量,但是在这
里它的大小(长度)并不重要.我们可以说绕着 u
1
= (0, 0, 1)
T
这个轴进行旋转,也
可以说绕着 u
2
= (0, 0, 3)
T
旋转.虽然这两个向量完全不同,但是它们指向的都是同
一个方向(即 z 轴的方向):
y
z
x
u
2
u
1
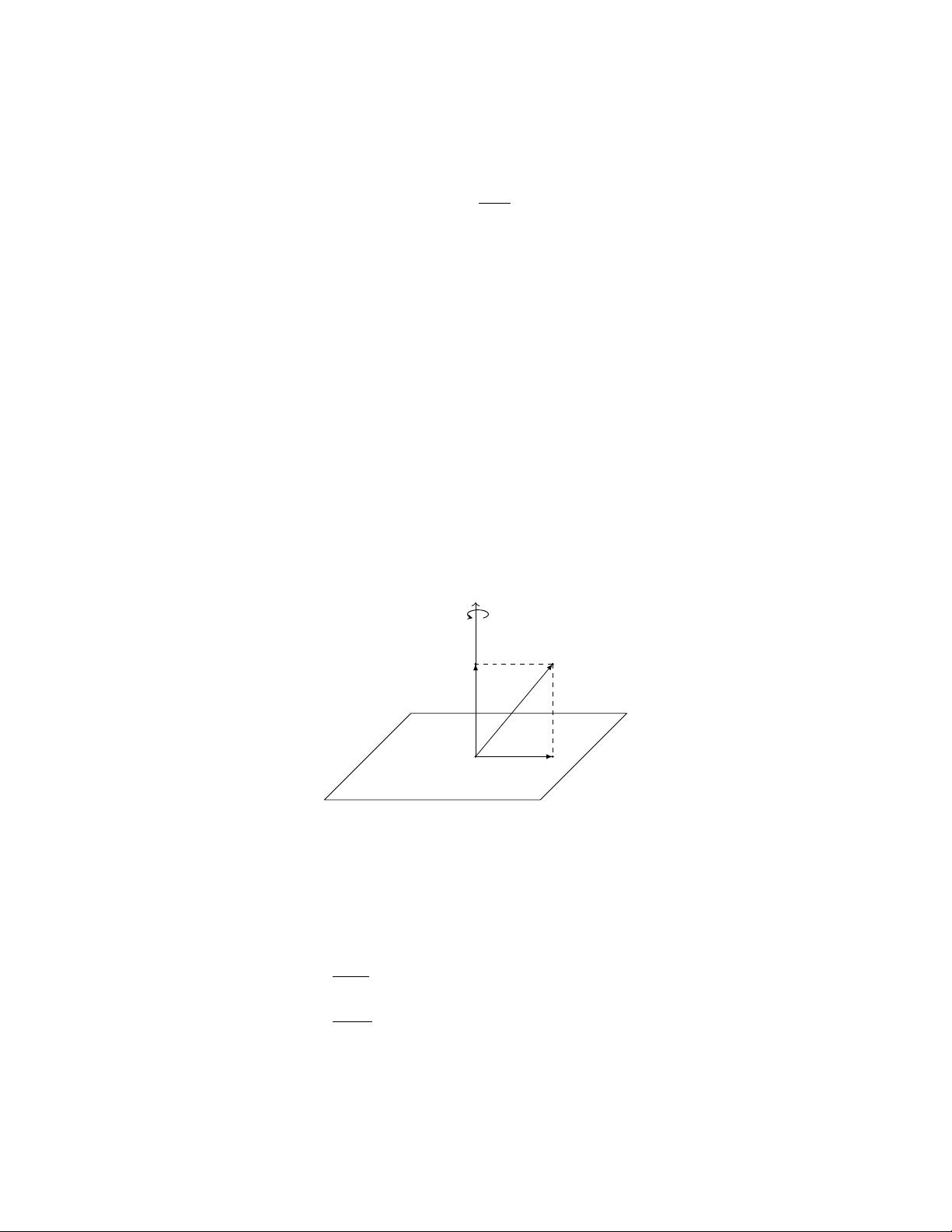
在三维空间中定义一个方向只需要用到两个量就可以了(与任意两个坐标轴之间的
夹角).最简单的例子就是地球的经纬度,我们仅仅使用经度和纬度两个自由度就可
以定义地球上任意一个方位.而如果我们要表示某一个方位上的特定一个点,则还
需要添加海拔这个自由度.
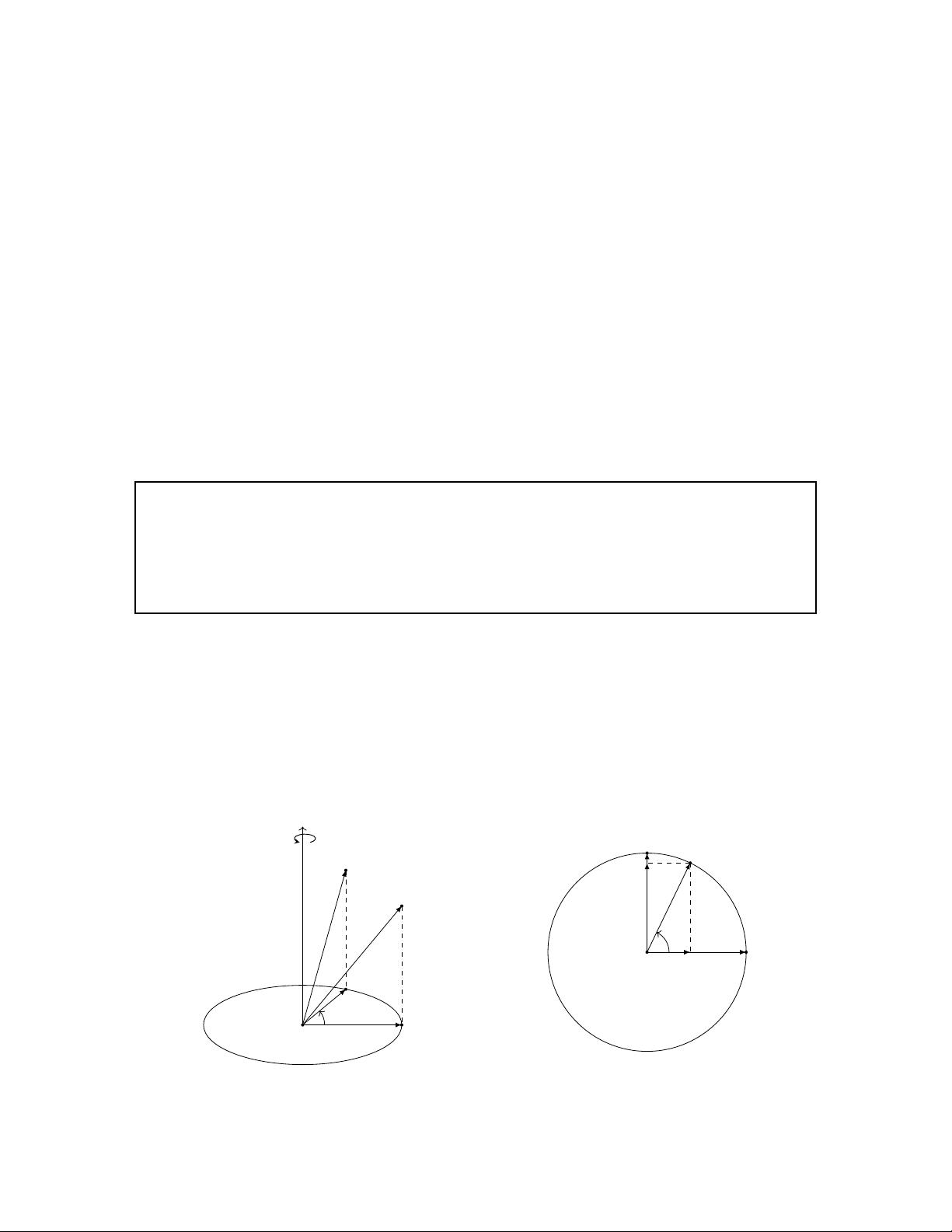
为了消除旋转轴 u 模长这个多余的自由度,我们可以规定旋转轴 u 的模长为
∥u∥ =
p
x
2
+ y
2
+ z
2
= 1,也就是说 u 是一个单位向量.这样子一来,只要给出 u
的任意两个坐标,我们都能求出第三个坐标.比如,我们规定了 u 的 x , z 坐标,那
么就能得到 y =
√
1 − x
2
−z
2
.我们其实可以将模长规定为任意的常量,但是规定
∥u∥ = 1 能为我们之后的推导带来很多的便利,这也是数学和物理中对方向定义的惯
例.
12
剩余71页未读,继续阅读
205 浏览量
111 浏览量
134 浏览量
2019-05-29 上传
182 浏览量
111 浏览量
285 浏览量
2022-11-11 上传
875 浏览量









