CANopen协议在分布式伺服电机控制器中的应用与实验验证
需积分: 48 115 浏览量
更新于2024-09-11
5
收藏 1.81MB PDF 举报
CANopen协议在伺服电机控制中的实现是一种现代工业通信技术的应用,它为分布式伺服电动机驱动控制系统提供了标准化的通信手段,增强了设备间的互操作性。CANopen协议的核心是其对象字典(Object Dictionary, OD),这是一种结构化的数据存储方式,定义了网络上每个设备的功能模块和参数,使得设备能够通过统一的接口进行交互,提高了系统的灵活性和效率。
CANopen协议的工作原理是基于现场总线(Fieldbus)的CAN (Controller Area Network),一种实时通信标准,特别适合于对时间敏感的工业自动化应用。在分布式伺服电机驱动控制系统中,CANopen协议允许各个节点(如电机驱动器)在无需共享底层硬件细节的情况下协同工作,实现了远程诊断、参数配置和实时状态监控等功能。
本文主要关注了CANopen网络节点的状态转换流程,这是确保系统稳定运行的关键环节。通过分析节点在启动、初始化、运行、故障处理等不同阶段的行为,可以优化控制策略,确保数据的可靠传输和处理。作者选择了PIC32单片机作为CANopen控制器的硬件平台,这种高性能微控制器提供了足够的处理能力和扩展性,支持CANopen协议的复杂逻辑。
在实际应用中,作者将CANopen控制器集成到医疗机械臂的高精度定位控制系统中。实验结果显示,该控制器具有出色的实时性和稳定性,显著提升了系统的动态响应和位置控制精度,从而提高了机械臂的动作柔顺性和整体性能。这一成果表明,CANopen协议在伺服电机控制领域的应用具有很高的实用价值,对于工业自动化、机器人技术等领域的发展具有重要意义。
总结来说,本文介绍了CANopen协议在分布式伺服电机驱动控制中的具体实现,包括协议的工作原理、节点状态转换、硬件选型(PIC32单片机)以及在医疗机械臂中的实际应用效果。这展示了CANopen如何通过标准化和互操作性提升设备间通信的效率,为工业自动化系统提供了一种有效的解决方案。
{嗡持电棚
2014年第42卷第9期
研驱动攀制.,
’……………………………………………………·…………………………………………-o∥%g口彩口%猁……:
CANopen协议在分布式伺服电动机控制器中的实现
曹祥红1,张华2
(1.郑州轻工业学院,郑州450002;2.河南工业大学,郑州450001)
摘要:介绍了采用CANopen协议进行通讯的分布式伺服电动机驱动控制系统工作原理,分析了CANopen网络
上电机驱动器节点的主要状态转换流程,设计了PIC32单片机的CANopen控制器,在试制样机的基础上进行了通讯
控制实验,并用于医疗机械臂的高精度定位控制,结果表明该控制器具有较好的实时性和稳定性,提高了整个控制
系统动作的柔顺性,具有一定的实用价值。
关键词:CANopen协议;PIC32单片机;伺服电动机;驱动器
中图分类号:TM383.4
文献标志码:A
文章编号:1004—7018(2014)09—0063—04
Realization
of
CANopen
Protocol
in
a
Distributed
Servo
Motor
Controller
CAO
Xiang-hon91,ZHANG
Hua2
(1.Zhengzhou
Institute
of
Light
Industry,Zhengzhou
450002,China;
2.Henan
University
of
Technology,Zhengzhou
450001,China)
Abstract:CANopen
protocol
was
introduced
for
developing
distributed
servo
motor
controller
in
this
article.The
pri—
mary
states
transition
of
CANopen
network
nodes
were
analyzed.A
CANopen
controller
prototype
was
designed
with
PIC32
MCU
and
applied
to
a
medical
robot
alqn
control
system
to
achieve
high
precision
positioning
contr01.Experimental
data
show
that
the
prototype
has
good
real—time
performance
mid
stability.It
can
improve
flexibility
of
the
control
system,and
has
practical
values.
Key
words:CANopen
protocol:PIC32
microcontroller;servo
motor;driver
0引
言
CAN(Controller
Area
Network)是ISO国际标准
化的串行通信协议,通过IS011898及IS011519进
行了标准化,成为目前在欧洲广泛使用的标准汽车
网络协议…。因CAN网络的高速性和可靠性,逐渐
被人们接受并扩展到了工业自动化、船舶、医疗设备
等多个领域。随着时代的进步和技术的发展,医疗
外科机械臂技术获得长足发展,目前国内外典型的
医疗机械臂控制系统多采用PC作为主控机,通过
运动控制卡进行集中控制,PC通过运动控制卡控制
各自由度电机的所有运动参数-2。3
J。此类控制方式
的优点是Pc上软件资源丰富,便于系统集成和二
次开发,控制系统完成的运动控制功能多样;缺点主
要是控制系统的实时性受Pc所采用的操作系统影
响较大。
因此,能否快速、准确地与机械臂各自由度电机
驱动器进行实时、准确的数据传递是其控制系统需
要重点考虑和解决的问题。本文设计了一种以分布
式伺服电动机作为驱动机构,CANopen通讯控制器
收稿Et期:2014—02—26
基金项目:河南省科技厅蕈点科技攻关项目(142102310361,
132102310283)
为控制核心,PC作为后台监控的医疗机械臂控制系
统方案,具有实时性较高的通讯能力和良好的位置
控制精度,满足了实际使用需要。
1控制系统方案
1.1控制系统组成
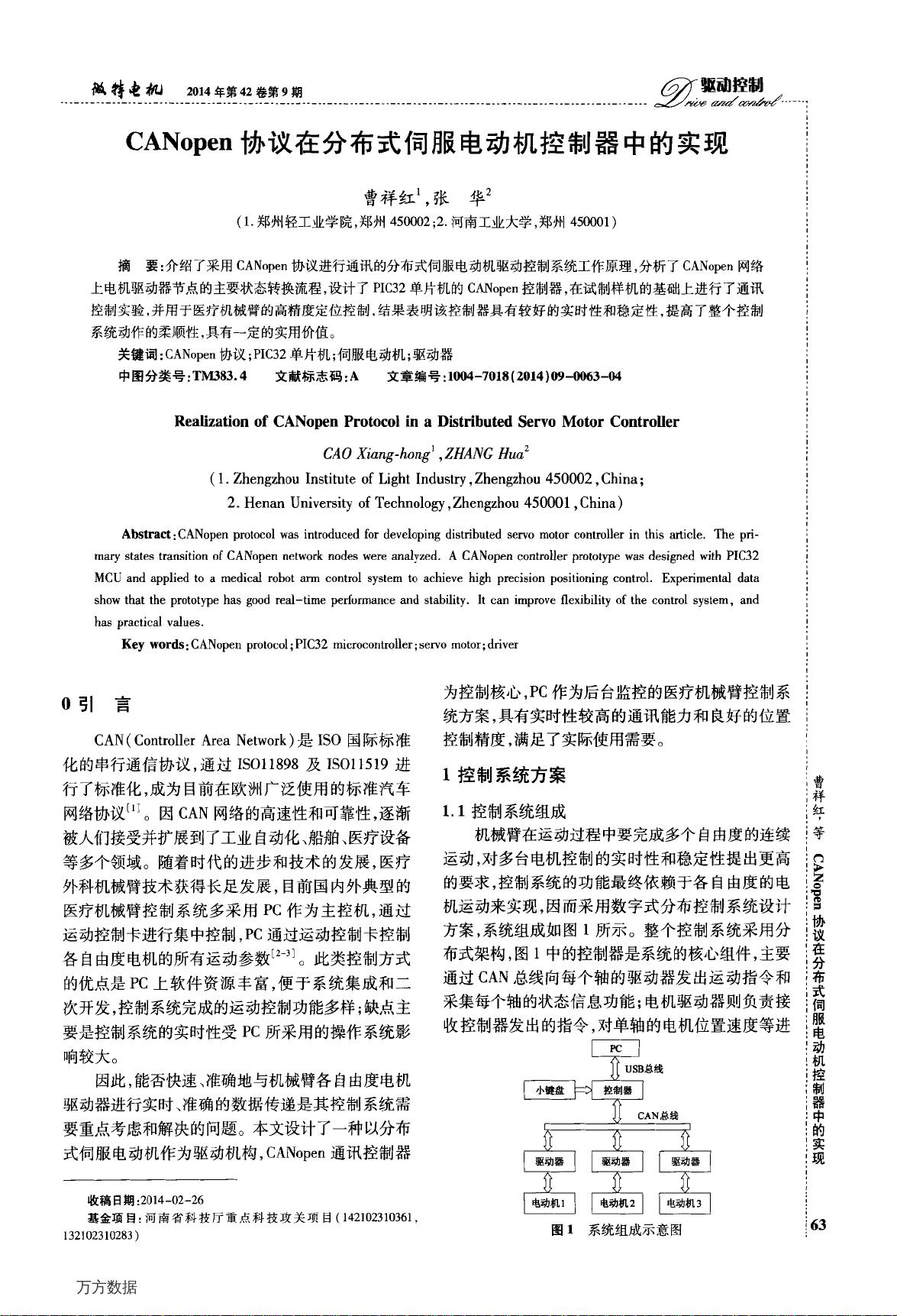
机械臂在运动过程中要完成多个自由度的连续
运动,对多台电机控制的实时性和稳定性提出更高
的要求,控制系统的功能最终依赖于各自由度的电
机运动来实现,因而采用数字式分布控制系统设计
方案,系统组成如图1所示。整个控制系统采用分
布式架构,图1中的控制器是系统的核心组件,主要
通过CAN总线向每个轴的驱动器发出运动指令和
采集每个轴的状态信息功能;电机驱动器则负责接
收控制器发出的指令,对单轴的电机位置速度等进
曹
祥
红
,
等
n
》
2
o
葛
皇
图1系统组成示意图
63
协议在分布式伺服电动机控制器中的实现
万方数据
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
124 浏览量
546 浏览量
1061 浏览量
124 浏览量
1997 浏览量
546 浏览量
2119 浏览量
340 浏览量

yd19910830
- 粉丝: 3
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







