KUKA机器人控制系统KRC2版操作手册
需积分: 10 35 浏览量
更新于2024-07-28
收藏 7.17MB PDF 举报
"该文档是KUKA机器人集团关于KRC2 edition 05控制器的操作指南,主要介绍了机器人的开发和试教流程。"
本文档详细阐述了KUKA机器人系统的各个方面,旨在帮助用户理解和操作KRC2版控制器。这份指南适用于对机器人技术感兴趣的开发者、工程师以及维护人员,为他们提供了全面的技术信息。
1. 引言部分介绍了目标受众,包括可能需要此手册的各类专业人士,并提到了相关的机器人系统文献和使用的概念。
2. 产品说明深入地探讨了机器人系统:
- 机器人系统概览:概述了整个系统的组成部分,包括机器人本体、控制系统和周边设备。
- 机器人控制系统概览:详述了控制系统的结构和功能。
- 控制系统PC机说明:涵盖了PC机的接口、PCI插槽分配、主板、硬盘、可选的CD-ROM、软盘驱动器、多功能卡(MFC3)、数字电子伺服设备(DSE-IBS-C33)、分解器数字转换器(RDW)、库卡VGA卡(KVGA)以及电池等硬件组件。
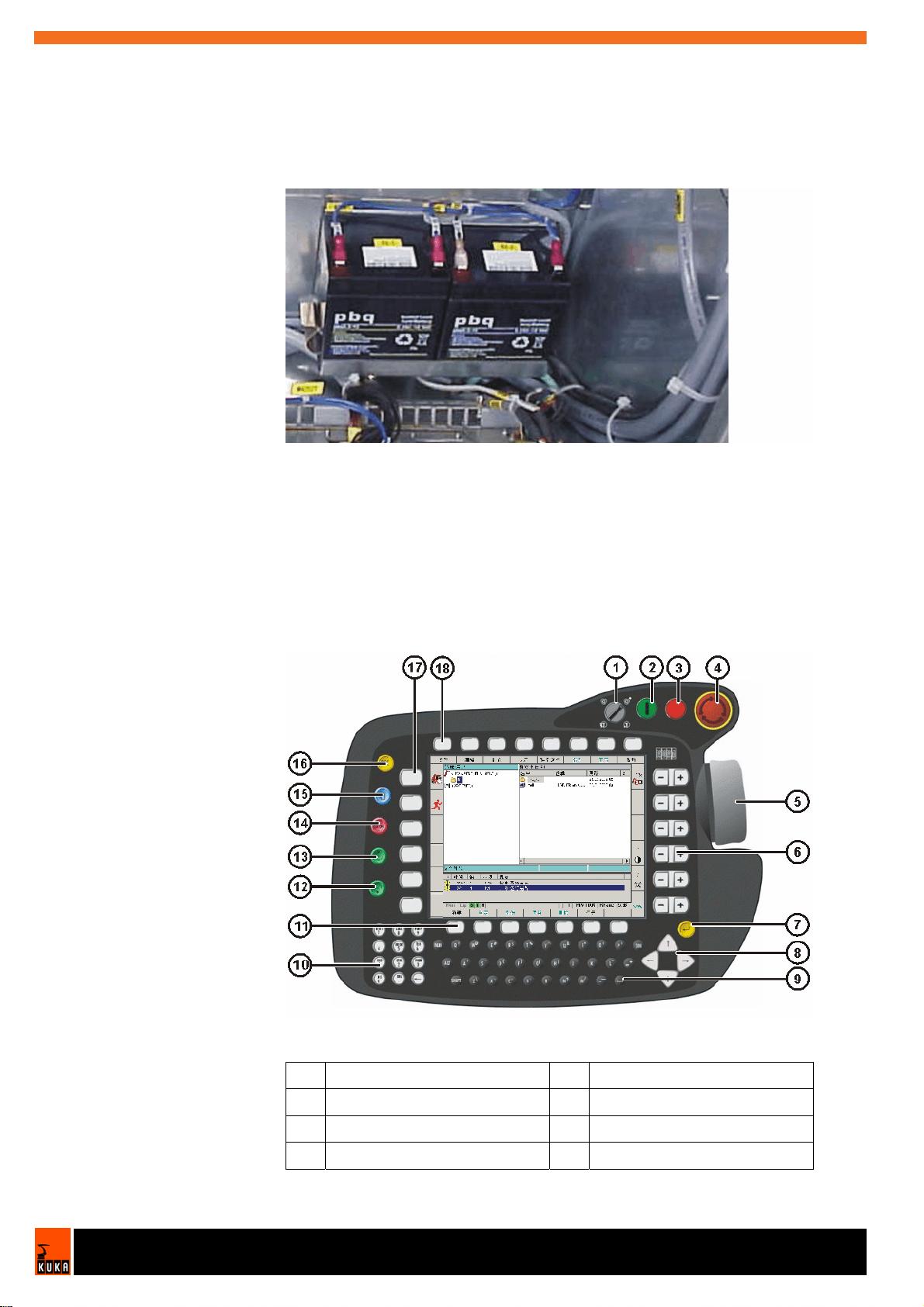
3. 库卡控制面板(KCP)的介绍:
- 前部和背面的功能解析,包括用户界面和控制按钮。
- KCP耦合器(选项)的说明,用于连接和扩展控制面板的使用场景。
4. 安全方面,文档提到了电子安全回路(ESC)的安全逻辑系统,这是确保机器人操作安全的关键部分,包括其工作原理和功能。
此外,虽然文档中没有具体提及“机器人试教”的详细步骤,但可以推测这部分内容可能涉及如何通过KCP进行程序编写、示教点设置、运动路径规划等实际操作过程,以教会机器人执行特定任务。这些通常会涵盖基本的编程语言、示教模式、关节坐标和工具坐标系的设定等。
总体来说,这份文档为KUKA机器人的开发和调试提供了坚实的基础,无论是对于初次接触的初学者还是经验丰富的技术人员,都能从中获取到宝贵的信息。由于篇幅所限,更多细节和实践操作步骤可能在文档的后续章节中展开。
KR C2 edition05
16 / 171 Issued: 31.01.2008 Version: BA KR C2 ed05 V1 zh
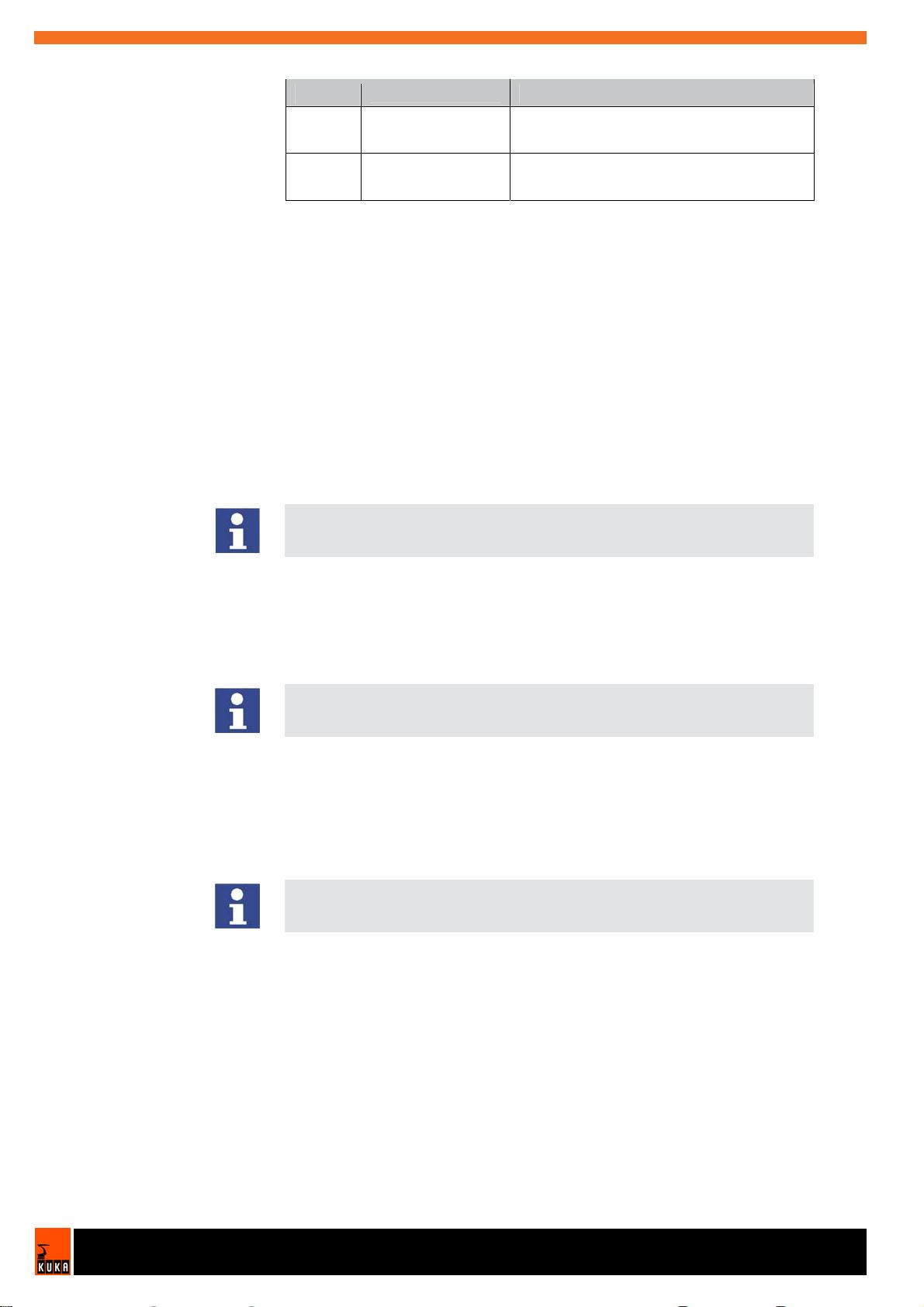
项号
LED
说明
2 LED 2
DeviceNet(设备网)CAN
总线(双色数据位显示)
3 LED 1
DeviceNet(设备网)CAN
总线(双色数据位显示)
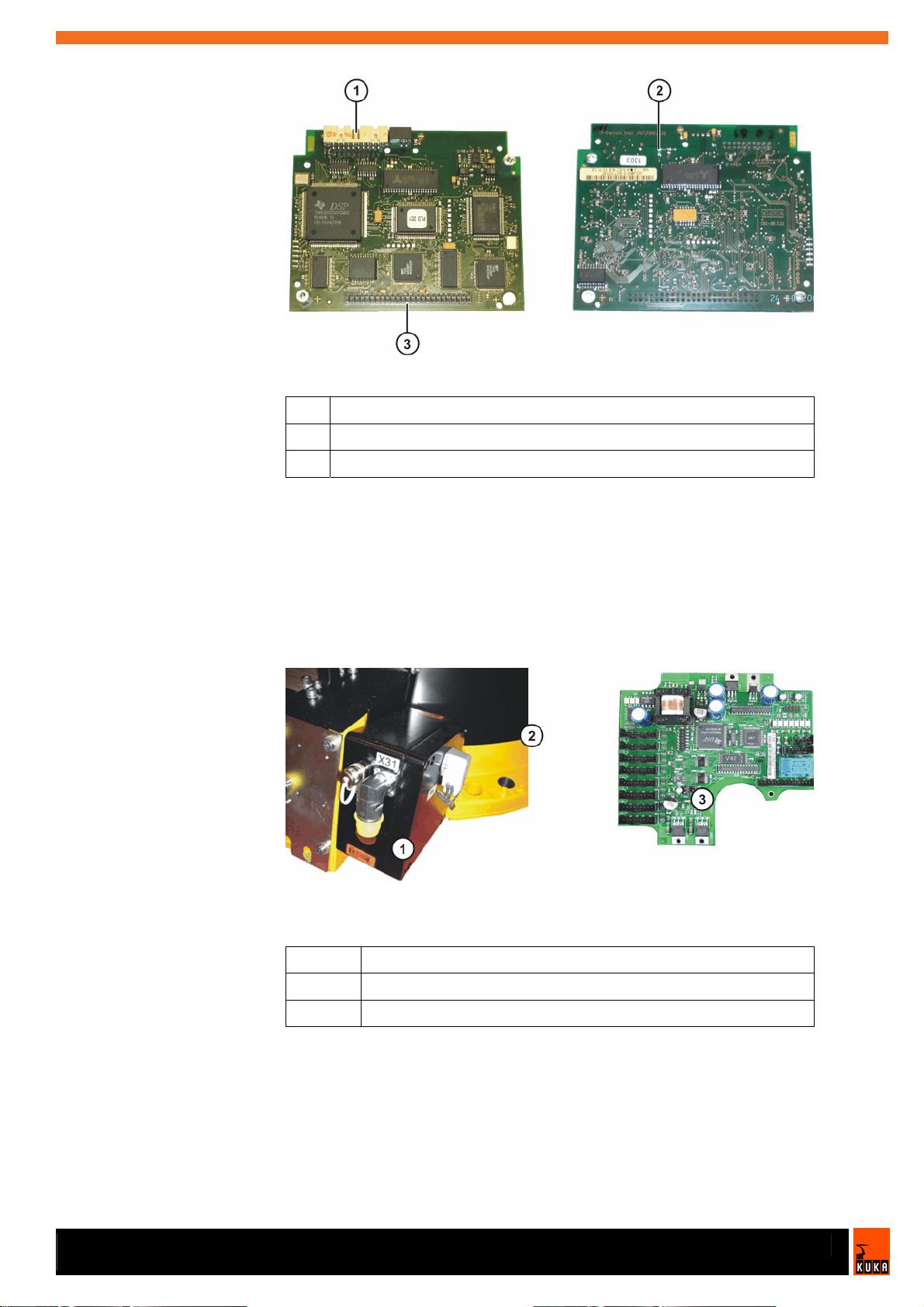
MFC3 标准卡包括系统输入端/输出端,且具有以下功能:
用于 VxWinRT 的 RTAcc 芯片(实时功能)
DeviceNet(设备网)接口
用于视客户需要的专用连接。
推荐使用 Multi-Power-Tap 选项。
只作为主回路。
到数字式电子伺服设备(DSE)的接口
MFC3 标准卡最多只能容纳两个 DSE-IBS-C33 组件。
到 CI3 安全逻辑电路的接口
风扇监控设备
更多关于
DeviceNet(设备网)接线方面的信息可在专门的库卡文献中找到。
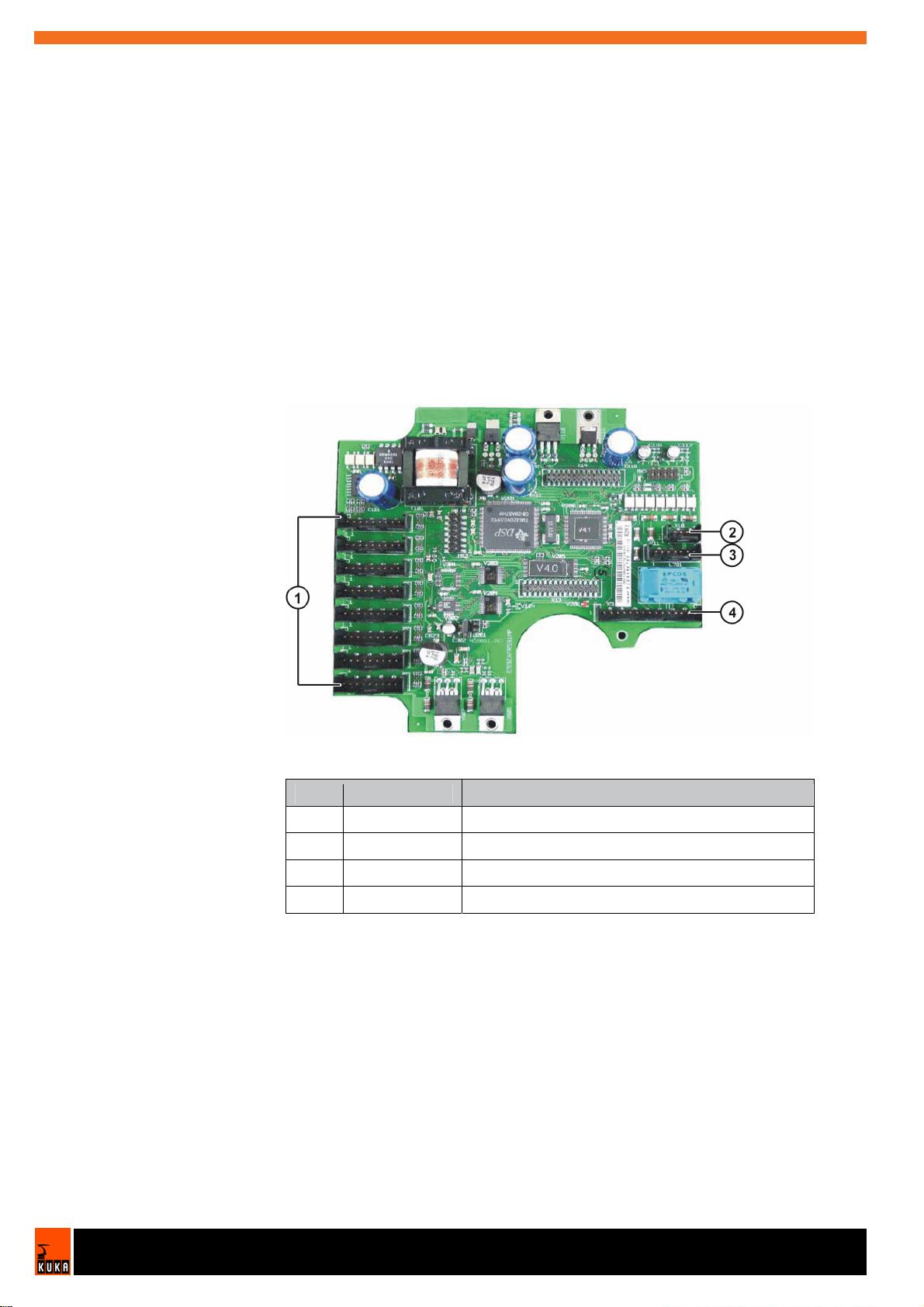
MFC3 工艺卡包括系统输入端/输出端,且具有以下功能:
MFC3 标准卡的所有功能
用于 CR 选项(RoboTeam)的接口
SafeRobot 接口
MFC3 工艺卡只能与 CI3 工艺卡一同使用。
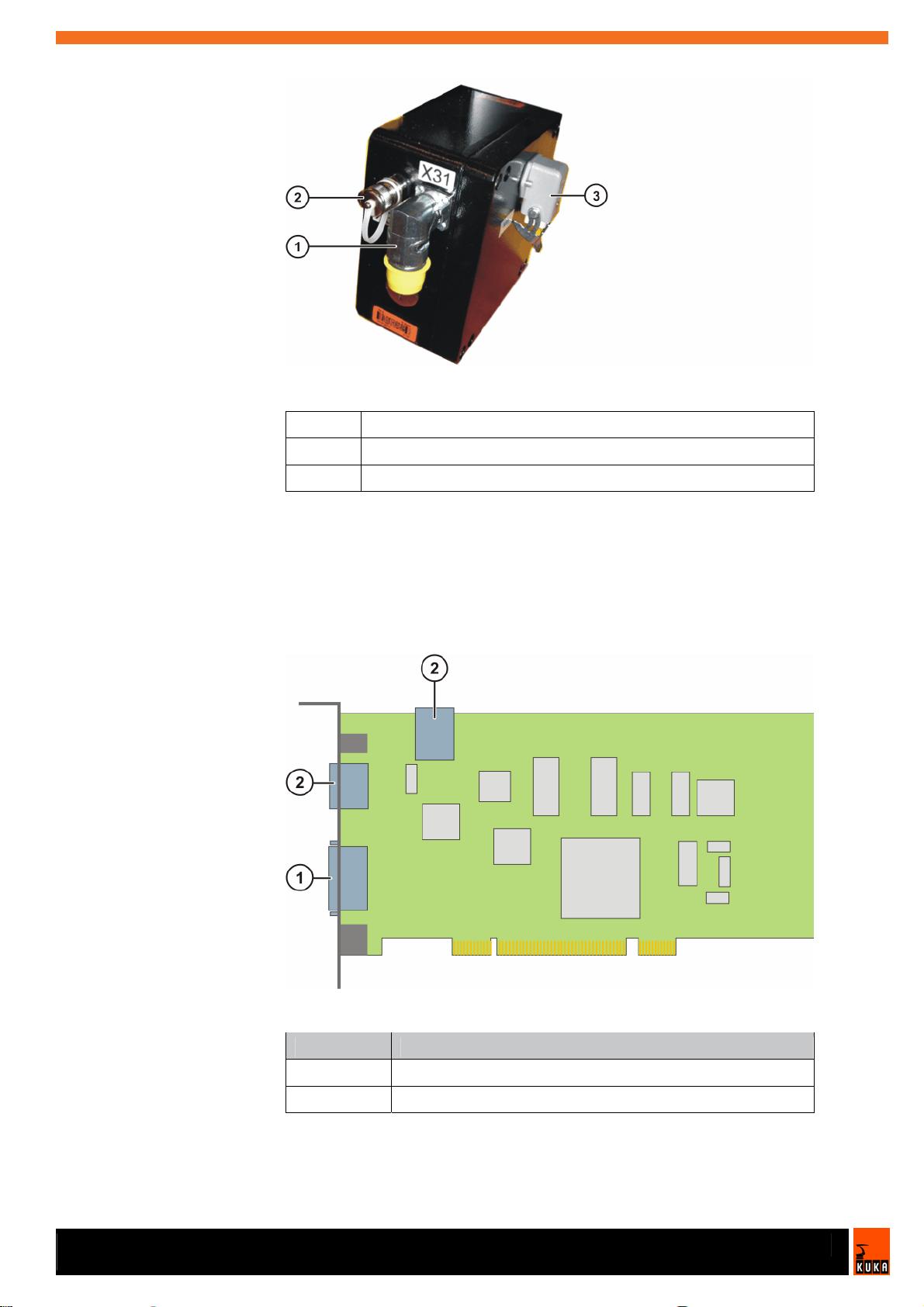
2.3.8 数字电子伺服设备(DSE-IBS-C33)
DSE-IBS-C33 插在 MFC3
上,用来控制伺服模块。由伺服模块读取到的故障信息及状态信息将进行后续
处理。
如果机器人系统中使用的轴超过 8 个,则必须给 MFC3 附加一块 DSE-IBS-
C33-AUX 电路板。
MFC3 标准卡
MFC3 工艺卡
说明
概览
剩余170页未读,继续阅读
1594 浏览量
872 浏览量
1366 浏览量
2024-11-19 上传
482 浏览量
165 浏览量

vgogo2013
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- webservice
- EXTJS 中文手册
- ubuntu8.04速成手册1.0
- Installing & Configuring Developing With XAMPP
- c#中treeview的使用方法
- 《华为认证网络工程师》自测题
- c#中进度条的使用技巧
- cn_foundation_Actionscript3.0_Animation
- R1762_R2632_R2700 RGNOS10.2配置指南_第四部分 应用协议配置指南
- 一个中专生的程序员之路
- R1762_R2632_R2700 RGNOS10.2配置指南_第三部分 IP地址与服务配置指南
- 详解西门子间接寻址详解西门子间接寻址
- 微 软 C 编 程 精 粹
- MyEclipse 6 Java 开发中文教程
- C#完全手册.pdf
- VARIANT的用法
