Matlab与OpenCV实现精准双目测距:原理与实践
需积分: 0 68 浏览量
更新于2024-08-04
3
收藏 2.48MB DOCX 举报
双目测距是一种利用计算机视觉技术实现深度感知的方法,它基于左右两个摄像头同时捕捉同一场景的图像,通过计算它们之间的视差来估计目标物体与摄像头的距离。这项技术在许多领域,如机器人导航、增强现实和三维重建中具有重要应用。在Matlab和OpenCV这样的开源软件平台上,双目测距的实现涉及到关键步骤和参数。
首先,双目测距的核心在于获取准确的内参和外参。内参包括焦距fc(像素尺度)、主点Principal Point(图像坐标系中的中心点)、径向畸变Radial Distortion、切向畸变Tangential Distortion以及偏斜畸变skew。这些参数反映了摄像头的几何特性,是通过标定过程得到的。外参则是描述两个摄像头之间的相对位置,包括旋转矩阵Rotation、平移矩阵Translation、基础矩阵Fundamental Matrix和特征矩阵Essential Matrix。标定的目的是为了确保两个摄像头的成像平面在同一三维空间中对齐。
标定过程中,使用棋盘纸作为参考模板,通过Matlab的StereoCameraCalibrator工具简化了这个过程。标定步骤包括添加图像、校准,然后导出相机参数。Matlab提供了直观的用户界面,使得标定过程相对容易,但实际操作中需要注意保证相机镜头的同步,选择无畸变或低畸变的90度以下镜头,并使用专用的数据线连接。
在标定完成后,需要进行立体校正,这涉及使用cv::stereoRectify()函数,该函数根据内参和外参调整左右相机的图像,使其在平面上对应,消除视差图中的畸变。接着,使用立体匹配算法,如SGBM( Semi-Global Block Matching)或BM(Block Matching),计算出图像间的视差图,这是计算距离的基础。
然而,双目测距并非没有挑战。实际应用中,除了标定误差,还需要考虑正向畸变、切向畸变等图形畸变的影响。因此,立体匹配后的结果可能还需进一步处理,以减小误差并提高精度。通过不断优化算法、调整参数和校正过程,可以提高双目测距系统的稳定性和效率。
总结起来,基于Matlab和OpenCV的双目测距技术需要对摄像头参数有深入理解,包括标定、校正和匹配流程,以及如何处理各种类型的畸变。掌握这些关键技术,可以帮助开发者构建出高效、精确的双目深度感知系统。
子之间的间隔。
三、相机标定
3.1 基于 Matlab 的标定和参数解读
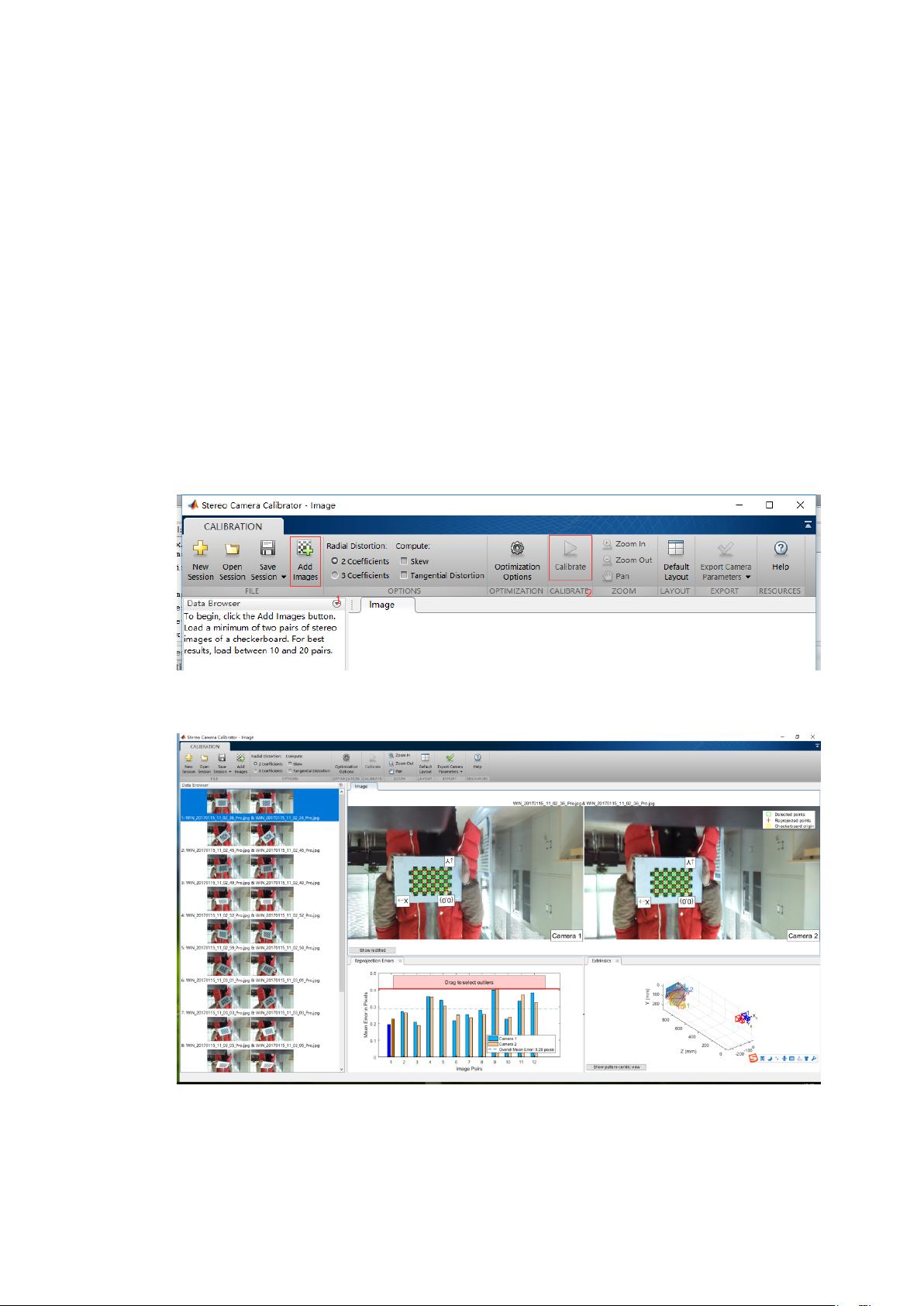
3.11 Matlab 标定步骤
Matlab(2016a)下的标定比较简单。依次选择 应用程序->Stereo
Camera Calibrator ->Add Image->Calibrate(如下图)。
标定结果如下:
再点击 Export Camera Parameters,将所有数据导出到 Matlab 工作区间。
图片如下:
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-05-20 上传
2023-09-05 上传
2021-07-10 上传
2021-06-27 上传
2021-10-16 上传

BJWcn
- 粉丝: 35
- 资源: 293
 我的内容管理
展开
我的内容管理
展开







最新资源
- 编程之道全本 by Geoffrey James
- JBoss4.0 JBoss4.0 JBoss4.0 JBoss4.0 JBoss4.0
- DWR中文文档,DWR中文文档
- 汉诺塔问题 仅限11个盘子 效率较高
- 生化免疫分析仪——模数转换模块设计
- ajax基础教程.PDF
- symbian S60编程书
- 智能控制\BP神经网络的Matlab实现
- matlabziliao
- PowerBuilder8.0中文参考手册.pdf
- NNVVIIDDIIAA 图形处理器编程指南(中文)
- UMl课件!!!!!!!!!
- 电工学试卷及答案(电工学试卷2007机械学院A卷答案)
- 高质量C++编程指南.pdf
- 大公司的Java面试题集.doc
- 基于UBUNTU平台下ARM开发环境的建立
