FANUC机器人Socket Message通讯设置详解及实战教程
需积分: 50 28 浏览量
更新于2024-07-15
4
收藏 774KB PDF 举报
FANUC机器人Socket Message通讯设置及使用手册是针对FANUC机器人用户的一份详尽指南,它主要讲解了如何通过TCP/IP协议实现机器人与上位机或工业相机之间的数据交换。这份文档适用于所有FANUC机器人型号,特别强调了USB存储器在导入相关程序中的使用。
在硬件方面,手册指出所有FANUC机器人型号都支持这种通信方式,但用户需要确保他们的机器人系统运行在V8.30P版本,或者对于V9.10P系列以上的系统,可能需要提前联系上海发那科获取兼容的Option软件——UserSocketMsg (R648)。
在软件设定上,首先,用户需要进入系统的系统变量设置部分,通过菜单操作找到并设置系统变量$KAREL_ENB为1,以激活Socket Message功能。然后,用户需要在机器人控制器上进行IP地址的配置,通常在SETUP菜单下选择TCP/IP选项,并输入适当的IP地址和端口号。
手册详细介绍了如何在TP( Teach Pendant,示教盒)程序中调用通讯程序,提供了通讯程序的示例,并指导用户如何编写和理解程序。这部分内容对实际编程和调试连接过程非常实用,有助于用户有效地利用Socket Message进行机器人控制和数据交互。
这份手册是FANUC机器人用户进行Socket Message通讯设置和编程的重要参考资料,它涵盖了从硬件需求、软件配置到实际操作的全面指南,确保了机器人与上位机的高效协同工作。
SM-015/01
-4-
(1) 按 MENU 键
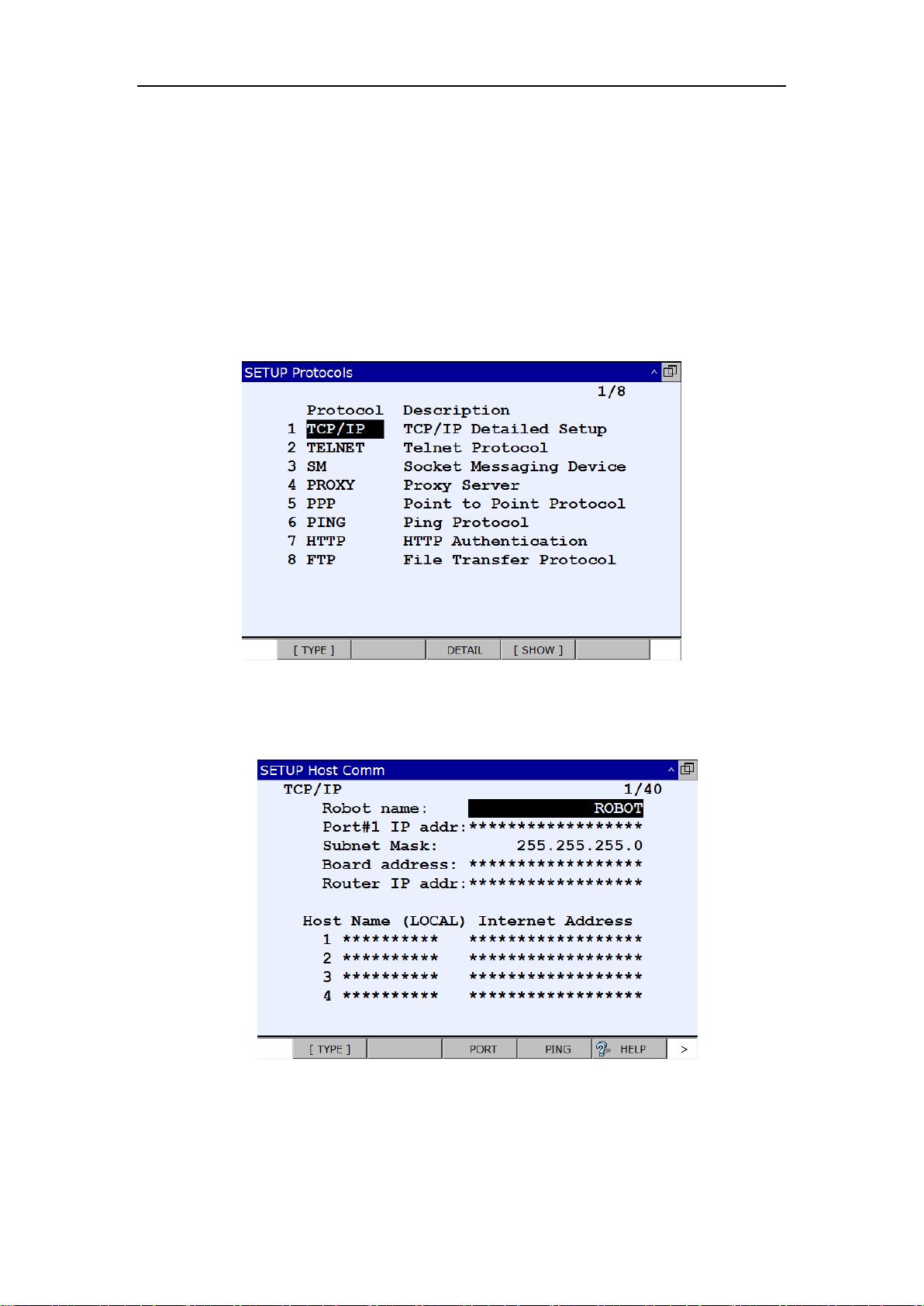
(2) 选择 SETUP
(3) 按 F1【TYPE】
(4) 选择 Host Comm,进入如下界面
选择 TCP/IP,按 Enter 键或 F3【DETAIL】键,进入:
在 Port#1 IP addr 所在行输入机器人的 IP 地址,例如 192.168.0.1。上位机的
IP 地址和机器人的 IP 地址需在同一网段,例如上位机 IP 地址可设为 192.168.0.2
剩余26页未读,继续阅读
2020-04-18 上传
2024-07-01 上传
2020-10-12 上传
219 浏览量
2024-01-30 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

青の城
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- compose_plantuml:从docker-compose文件生成Plantuml图
- ML:机器学习实践
- appInforManagement:app信息管理系统
- 【地产资料】XX地产 直客业务组主要业务P22.zip
- Excel模板本年度与上年同期产值对比图表.zip
- 柔光:屏幕上的免费视频会议照明
- DellInspiron530_ArchLinuxPlasma_Install
- ProcessExplorer_v15.12_Chs_for_PE.rar
- parking-control-app:停车场管理系统停车控制系统APP端
- 周黑鸭财务造假估值分析报告-51页.rar
- 毕业设计&课设--毕业设计-学生毕业设计选题系统.zip
- ReCapProject
- ServiceNow-Utils:适用于ServiceNow的Chrome和Firefox浏览器扩展
- Excel模板销售清单-打印模板.zip
- Decision_theory_lab2
- martinmosegaard.github.io
