STM32驱动的六足仿生机器人运动学与辅助结构设计
版权申诉
170 浏览量
更新于2024-06-21
收藏 2.82MB DOCX 举报
"基于STM32的六足仿生机器人设计5.0"
六足仿生机器人是一种模仿昆虫,特别是蜘蛛行走方式的机器人,属于足式机器人的一种。它们以其独特的结构和多足行走机制,能在各种复杂地形中保持良好的稳定性和机动性。这种机器人的研究与开发对于机器人技术在军事、救援、环境监测等多个领域的应用具有重要意义。
本设计主要涵盖了以下几个关键知识点:
1. **运动学分析**:运动学是研究机器人运动特性的基础,包括位置、速度和加速度等参数。对于六足仿生机器人,通过对每个关节的角度变化和腿的相对运动进行建模,可以解析出其运动学方程。这有助于理解机器人的动态行为,并为后续的控制策略提供理论基础。
2. **运动学方程的运用**:运动学方程能够描述六足机器人的腿部如何在空间中移动,从而实现行走。通过对这些方程的分析,可以确定每条腿在行走过程中的最佳路径,以确保机器人的步态稳定和效率。
3. **Matlab的机器人工具箱和遗传算法**:在设计机器人的步行轨迹时,利用Matlab的机器人工具箱可以简化计算过程,同时结合遗传算法进行优化,可以生成更符合实际需求的足部运动轨迹。这种方法既能保证路径的有效性,也能确保运动的平滑过渡。
4. **Adams运动仿真**:Adams是一款强大的机械系统动力学仿真软件,可以用来验证机器人的结构设计和运动性能。通过在Adams中进行仿真,可以预见到机器人在实际环境中的运动效果,及时发现并修正设计中的问题。
5. **辅助结构设计**:六足仿生机器人的防滑和测距设计是提高其功能性和适应性的关键。防滑设计可能涉及到足部的特殊纹理或结构,以增加与地面的摩擦力,而测距功能可能利用传感器来感知周围环境,帮助机器人判断行进距离和障碍物,提高其自主导航能力。
这篇文档详细介绍了基于STM32微控制器的六足仿生机器人设计,从理论分析到实际仿真,再到辅助结构的设计,全面展示了机器人研发的一个完整流程。STM32作为一款广泛应用的微控制器,它的强大处理能力和低功耗特性使得它成为此类项目理想的控制核心。通过这样的设计,我们可以期待在未来看到更多能在复杂环境中高效运作的六足仿生机器人。
2
相互交替,每次行进都是三足悬空、三足接地,以三角形支架结构交替前行。让重心保
持在三角形中,使得六足机器人在行进中有着良好的稳定性。
1.3 国内外关于六足仿生机器人的研究状况
随着人类科学技术的发展,人们对未知的探索越发热切,探索范围越来越大、越来
越深。期间充满危机,科技的快速发展也难以护得探索者周全。这时代替人类担任探索
任务的机器人应运而生。
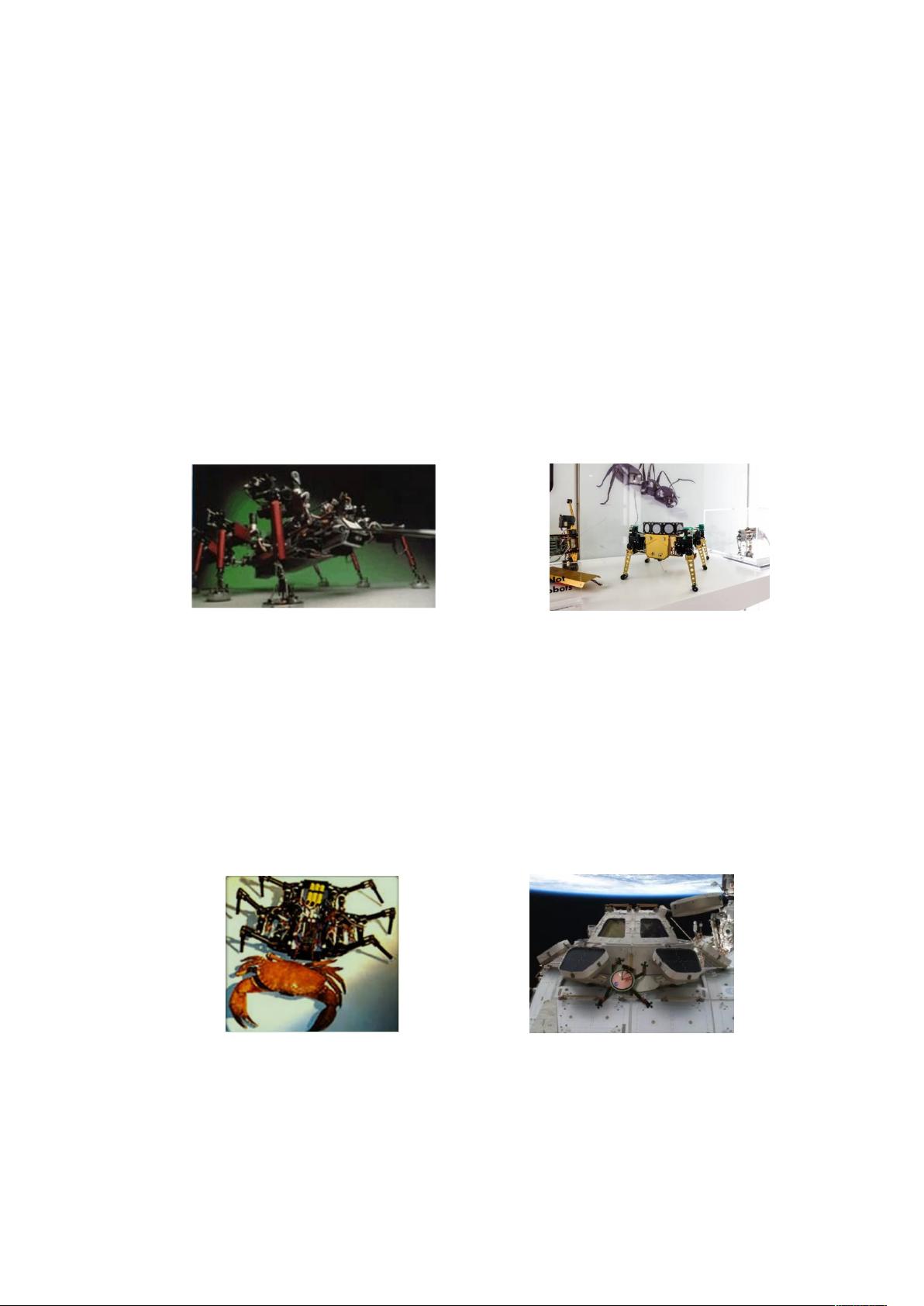
为了探索外星地貌,人类需要一种适应复杂地形环境的机器人。就这一目标美国于
1980 年起便开始了对六足机器人的研究,后来推出了 Genghis、Hannibal(图 1、图 2)
等六足机器人。
图 1 Hannibal 图 2 Genghis
1995 年前后 Rockwell 公司还研发了用以河道排雷的六足机器人 ALUV(图 3),在
设计时仿照了螃蟹的结构,且该机器人还可水陆两用,显示出了六足机器人对环境适应
性强的特点。
到了二十一世纪 NASA 因为勘探的需求,加大了在六足机器人的研发。作为收获,NASA
在 2002 年和 2005 年前后推出微型仿生蜘蛛机器人和 Lemur 系列(图 4)。其中 Lemur
系列已经可以应用于外太空的勘探和协助宇航员进行空间站的维修建设任务。
图 3 ALUV 图 4 Lemur
国内的六足机器人的研究大概在上世纪八十年代末,由清华大学、燕山大学、北京
航空航天大学、上海交通大学、哈尔滨工程大学、沈阳自动化研究所、哈尔滨工业大学
等大学机构进行了有关的研究。中国科学院沈阳自动化研究所与光机所于 1989 年 3 月
共同研制了海蟹号六足步行机器人。华中科技大学研制的“4+2”步行机器人。[1]还有
剩余30页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-11-22 上传
2023-09-09 上传
2023-03-21 上传
2023-09-09 上传

南抖北快东卫
- 粉丝: 80
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
