基于已知类别均值的频道化霍特林观察器性能估计理论结果
需积分: 10 60 浏览量
更新于2024-09-13
收藏 2.37MB PDF 举报
新的理论结果在通道化霍特林观察器性能估计中的应用
通道化霍特林观察器(Channelized Hotelling Observer,CHO)是一种常用的数学模型观察器,广泛应用于医疗成像社区中。CHO 的性能估计通常包括统计变异性,因此控制和限制这种变异性对于提高图像质量研究的统计权力至关重要。
在之前的一篇论文中,我们证明了通过包括图像类别均值的先验知识,可以大大减少 CHO 性能估计的偏差和方差。本文的目的是对之前论文中的估计理论进行改进和扩展,特别是在点估计和等数量图像类别的情况下。
在医疗成像中,图像质量评估是一个非常重要的问题。为了评估图像质量,需要对图像进行客观评估,而不是主观评估。因此,需要开发一个客观的图像质量评估方法。基于任务的图像质量评估是一种严格、原则性的方法,已经被广泛应用于医疗成像中。
在基于任务的图像质量评估中,模型观察器是一种非常有用的工具。模型观察器可以模拟人类观察者对图像的评估,提供客观的图像质量评估结果。CHO 是一种常用的模型观察器,已经被广泛应用于医疗成像中。
CHO 性能估计的关键问题是统计变异性。由于 CHO 性能估计通常包括统计变异性,因此需要控制和限制这种变异性,以提高图像质量研究的统计权力。通过包括图像类别均值的先验知识,可以大大减少 CHO 性能估计的偏差和方差,从而提高图像质量研究的统计权力。
本文对 CHO 性能估计的理论进行了改进和扩展,特别是在点估计和等数量图像类别的情况下。这些改进和扩展可以帮助提高 CHO 性能估计的准确性和 Robustness,从而提高图像质量研究的统计权力。
此外,本文还讨论了 AUC ROC 和 SNR 等图像质量评估指标的应用。这些指标可以用于评估图像质量,并对图像质量进行客观评估。
本文对 CHO 性能估计的理论进行了改进和扩展,讨论了图像质量评估指标的应用,旨在提高图像质量研究的统计权力和准确性。
184 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 60, NO. 1, FEBRUARY 2013
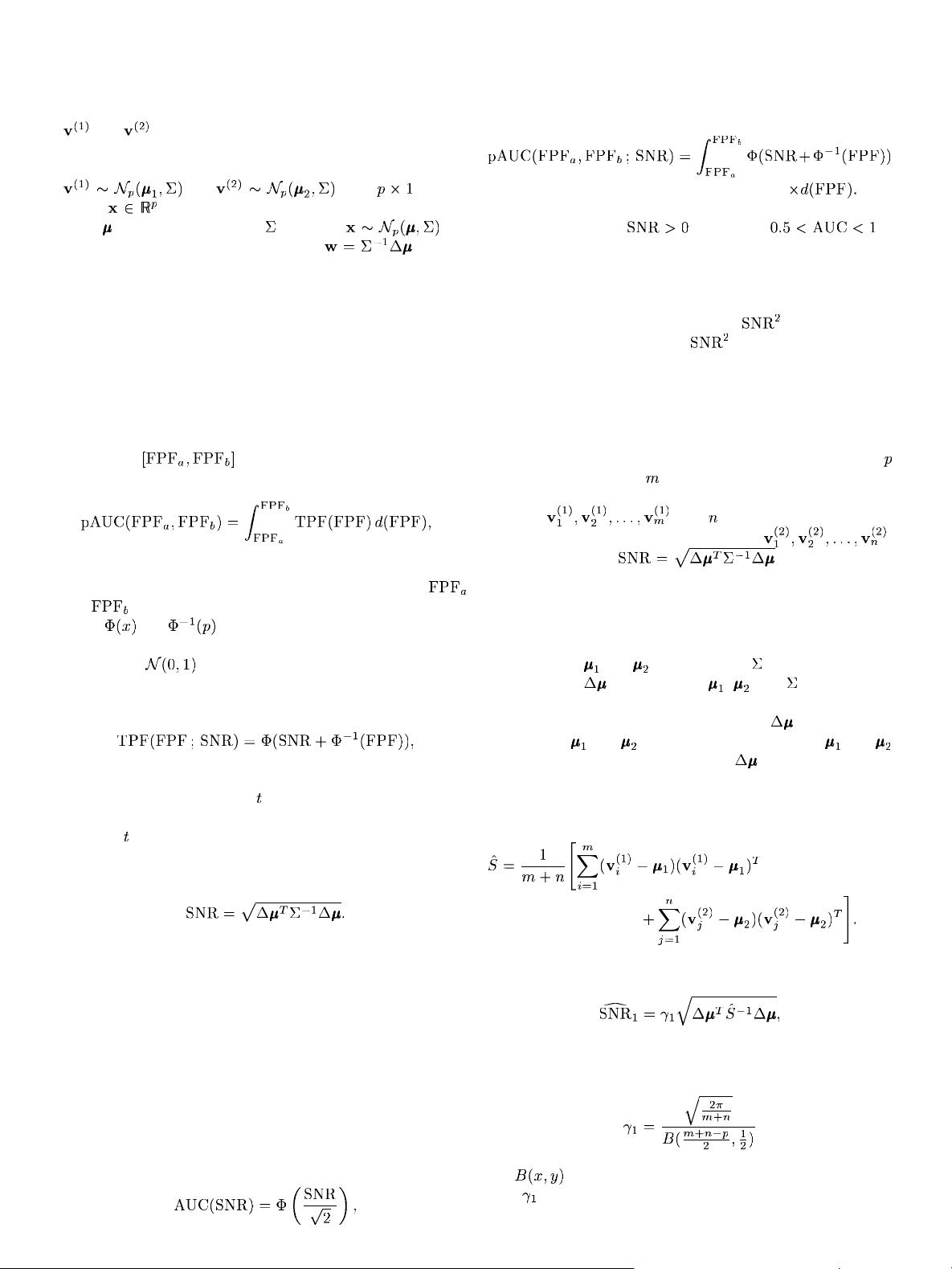
Let the channel outputs for classes 1 and 2 b e denoted as
and , respectively. Throughout this work , we a ssum e
that the channel output vector follows a multiv ariate normal dis-
tribution under each class with equal covariance matrices, i.e.,
and .(Ifa random
vector
follows a m ultivariate normal distributio n with
mean
and covariance matrix ,wewrite .) In
this setting, the CHO template becomes
,andthe
CHO is op tim al among all observers that operate on the channel
output vector [2, p. 851].
The performance of an observer on a binary classification task
is fully characterized by the observer’s r eceiver operating char-
acteristic (ROC) cur ve, which plots true positive fraction (TPF)
as a function of false positiv e fraction (FPF) [2], [3 5]. One figure
of merit that is commonly used for ROC evaluations is the area
under the ROC curve, denoted as AU C. The AUC can be in-
terpreted as the average T PF, averaged uniformly over all FPF
values [35]. Alternatively, if the o nly pertinent FPF values are
in the range
, then the partial area under the ROC
curve, defined as
(1)
can be a useful figure of merit [35]. The pAUC may be inter-
preted as the TPF averaged over the FPF values between
and .
Let
and be the cumulati ve distribution function
(cdf) and the inverse cdf, respectively, for the standard normal
distribution,
. Under our distributional assumptions for
the channel outputs, the ROC curve for a CHO takes the special
form [35, Result 4.7, p. 82]
(2)
where SNR is the observer signal-to-noise ratio, defined as the
difference of class means for
divided by the pooled standard
deviation [2, p. 819]. In our setting, where the CHO rating
statistic,
, is norm ally distributed for each class, SNR is a
meaningful figure of merit for class separability [2, p. 819], an d
it can be written in the form [2, p. 967]
(3)
From (2), observe that the ROC curve is parameterized by
only SNR. Hence, TPF at fixed FPF, AUC, and pAUC are func-
tions of SNR. Moreover, these figures of merit are a ll strictly
increasing functions of SNR, i.e., they are related to each other
through one-to-one mappin gs. This fact directly results from
(2), which shows that TPF at fixed FP F is a str ictly increasing
function of SNR. Later, we will utilize this property to con stru ct
confidence intervals for TPF, AUC, and pAUC from confidence
intervals for SNR.
The functional dependence of AUC and p AUC on SNR that
was mentioned above is relatively simple. Namely, under our
assumptions, AUC takes the form [2, p. 819] [35, p. 84]
(4)
and pAUC can be written as
(5)
Note that for a CHO,
, and hence, .
III. SNR POIN T ESTIMATION
Here, we introduce our unbiased SNR point estimators, which
are a useful alternative to the unbiased
estimators given
in [29], since SNR, rather than
is often of interest. Gen -
erally, we use the same notation as in [29], with only small
changes that are clear from the text. In order to write general
expressions that include the possibility of zero images from one
class, we use the notational convention that a summation is zero
if its upper limi t is zero.
Suppose that we wish to estimate SNR for a CHO with
channels. That is, given independent, identically distributed
(i.i.d.) measurements of the class-1 channel output vector, de-
noted as
,and i.i.d. measurements of the
class-2 channel output vector, denoted as
,
we seek to estimate
.
A. Estimator Definitions
As in our previous pap er [29], we consider two estimatio n
scenarios:
(1) known
and with unknown
(2) known with unknown , ,and .
Both scenarios have their practical m erits. As discussed in the
introduction, there are cases where finding
is much easier
than finding
and . On the other hand, finding and
may sometimes be easier than finding directly, particularly
when the imaging p rocess includes strong nonlinearities.
To build our SNR estimator for scenario 1, we start by
defining the pooled sam ple covariance m atrix estimator
(6)
Next, the SNR point estimator for scenario 1 is defined to be
(7)
where
(8)
and
is the Euler Beta function. T he multiplicativ e con-
stant
is an original contribution of this work; as we will see
later, it makes the SNR estimator unbiased.
剩余11页未读,继续阅读
2019-12-29 上传
2020-01-08 上传
2015-02-10 上传
2023-05-30 上传
2023-02-17 上传
2023-06-02 上传
2023-04-02 上传
2024-11-06 上传
2023-06-07 上传
2023-08-05 上传

liminghao821
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







