TwinCAT学习指南:从入门到进阶,无缝过渡到多核TP3
需积分: 13 72 浏览量
更新于2024-07-18
收藏 2.02MB PDF 举报
本资源主要针对TwinCAT的学习资料,特别是针对TwinCAT 3的操作与编程。TwinCAT是德国贝克霍夫公司(BECKHOFF)开发的全集成自动化软件平台,主要用于工业控制和机器自动化。书中提供的内容基于VS Shell 2013下的TC3.1.4018版本,但需要注意的是,随着软件的持续升级,操作界面可能会发生变化,且程序代码可能不适用于后续版本,因此在学习过程中,读者应保持对最新版本的理解。
章节中详细介绍了如何在TwinCAT中进行运动控制,包括手动配置界面操作。首先,用户需扫描电机设备,通过选择目标控制器,然后扫描设备并选择 EtherCAT 类型。对于旋转变压器反馈的电机,可能需要手动识别电机类型,而编码器反馈的电机可以自动识别。在添加轴的过程中,用户可以根据需要选择是否立即配置NC参数。
运动控制部分着重于轴的状态监控,如显示轴的位置(当前距离)和速度,以及错误代码(用于诊断驱动器问题)。为了使电机运行,必须启用电机,并利用TwinCAT的特性来设置和控制。书中还会涉及如何在实际项目中运用TwinCAT 3的新功能,如多核CPU的优势和64位操作系统性能的充分利用,以及开发工具的更新特性。
由于本书处于编辑阶段,作者的使用经验和知识尚在不断积累中,因此书中可能包含一些未完全成熟的内容。作者鼓励读者对书的结构和内容提供反馈,以便进行必要的调整和改进。读者可以通过电子邮件support@beckhoff.com.cn向作者提问或提出建议,视作者的工作进度来决定响应的时间。
本资源为学习者提供了一个入门到进阶的TwinCAT操作教程,不仅涵盖了基础配置,还关注新版本的特性和最佳实践,但同时也提醒读者关注版本更新可能带来的挑战。
For questions or comments, email support@beckhoff.com.cn
10
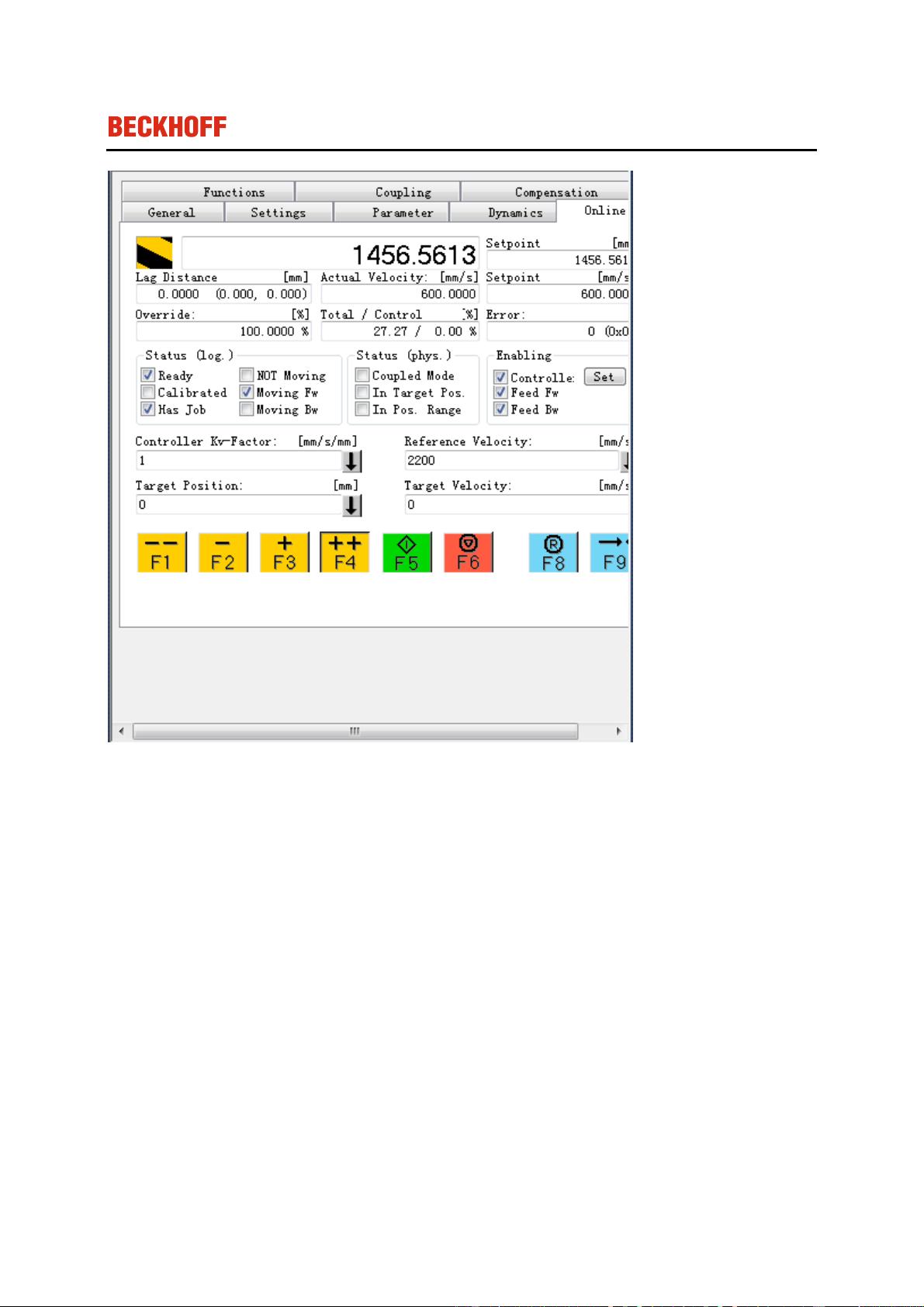
下方这些 F1,F2,F3,F4 分别表示,快退,慢退,慢进,快进。
F5,F6 表示启动和暂停。
F8 为 reset,用来解除报错状态的。
同样的测试对轴 2 也同样适用。
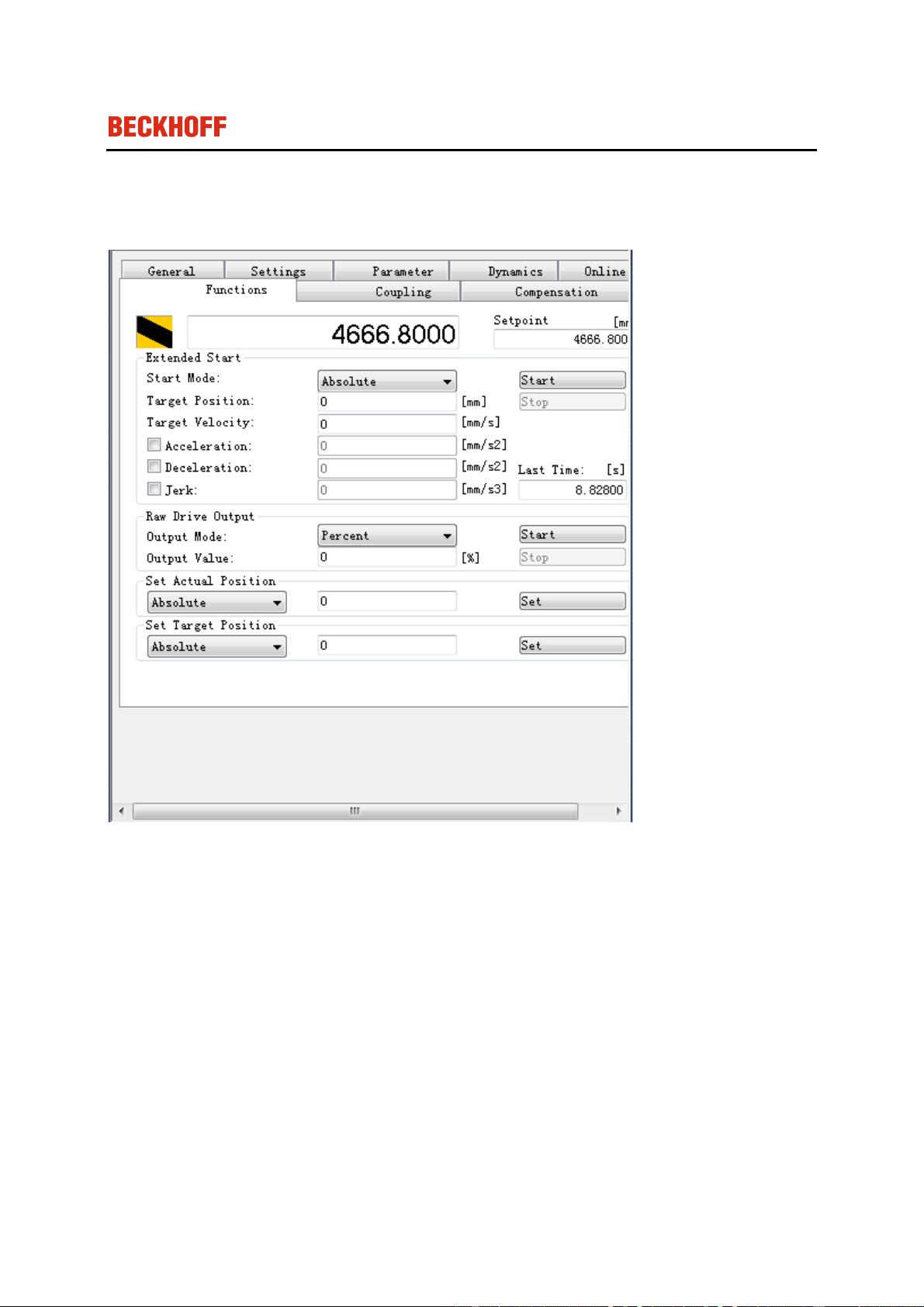
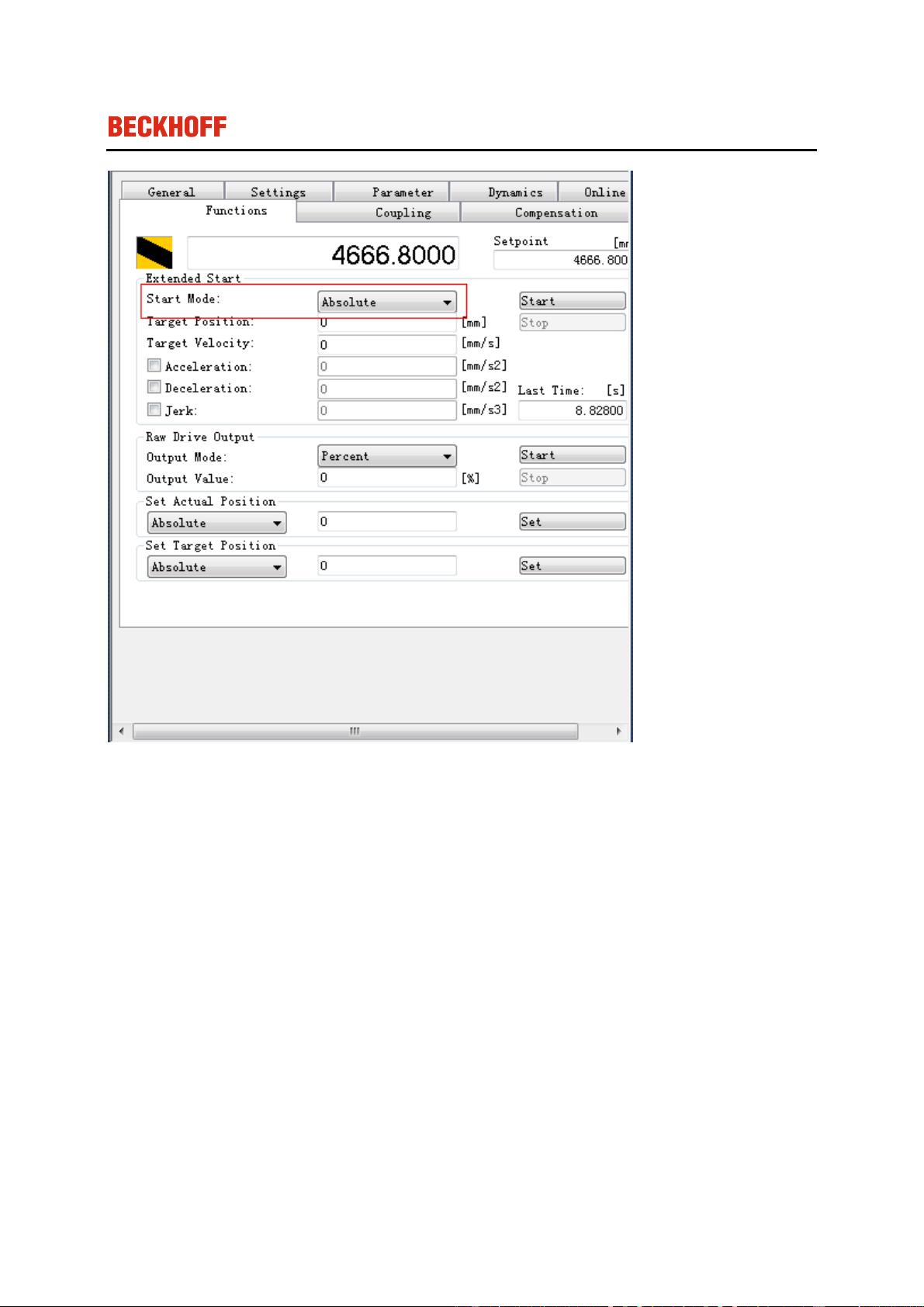
(二) 轴的运动
接下来是轴的运动,轴的运动有很多种,有绝对运动,相对运动,来回运
动,寸动等。
主要介绍绝对,相对和来回。
剩余55页未读,继续阅读
2023-06-07 上传
2023-05-01 上传
2023-09-16 上传
2023-06-20 上传
2023-06-21 上传
2023-07-30 上传

qq_38864415
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
