CAN协议网关设计:自动位速率检测与互连
"基于自动位速率检测的CAN协议网关"
本文介绍了如何设计一个基于8位微控制器P87C591的CAN协议网关,该网关具备自动位速率检测功能,能够连接使用不同协议的CAN1.2和CAN2.0网络。在CAN总线系统中,不同设备可能采用不同版本的协议,导致通信障碍,因此网关作为桥梁,可以在多个网络间转换数据并确保正确传输。
CAN总线是一种广泛应用的现场总线技术,1991年9月其技术规范从1.2版本升级到2.0版本,增加了扩展帧格式支持。然而,CAN1.2仅支持标准帧,无法处理扩展帧,这可能导致通信错误。为了解决这个问题,CAN协议网关应运而生,它不仅连接物理层,还处理数据链路层和应用层的协议差异。
在设计的网关中,使用了Philips公司的P87C591微控制器,它包含了两个独立的CAN控制器,可以同时处理两个不同速率的CAN网络。硬件结构包含微控制器、CAN控制器、位速率检测电路以及必要的接口电路,如电源管理和信号调理电路。
自动位速率检测是网关的一个关键特性,它允许网关动态适应不同CAN网络的波特率。这一功能的实现通常涉及到对CAN网络初始同步脉冲的捕获和分析,通过测量时间间隔来确定数据位的传输速率。一旦检测到正确的位速率,网关就能正确解码来自不同网络的CAN帧,并将它们转发到另一个网络,反之亦然。
软件实现方面,网关需要具备解析和生成CAN帧的能力,包括标准帧和扩展帧。对于接收的CAN帧,网关需要识别其帧类型,然后根据需要将其转换为另一网络可理解的格式。此外,还需要实现错误处理机制,确保在网络出现异常时,网关能够恢复并继续提供通信服务。
总结来说,这个基于自动位速率检测的CAN协议网关解决了不同版本CAN网络间的兼容性问题,通过智能地检测和转换波特率,确保了跨网络通信的顺畅。这种设计在混合动力电动汽车等需要多种CAN设备协同工作的系统中具有重要的应用价值。
第 27 卷第 1 期
武 汉 理 工 大学学 报· 信息与 管理 工程 版
V ol
. 27
N o
. 1
2005 年 2 月
JO U RN A L O F WU T ( IN F OR M A T IO N & M A N A GEM EN T EN G IN EERIN G )
Feb
. 2005
文章编号: 1007- 144
X
( 2005) 01- 0088- 04
基于自动位速率检测的 CAN 协议网关
张成才, 曾春年
( 武汉理工大学 自动化学院, 湖北 武汉 430070)
摘 要: 针对使用不同 协议的 CA N 网络, 采用功能强大的 8 位微控制 器 P 87C591 设计出一种具有 2 个独立
CAN 控制器的网关, 从而实现了 CA N 1. 2 与 CAN2. 0 网络的互连。给出了该网关在软硬件上的实现方法, 并
阐述了如何实现网关的自动位速率检测功能。
关键词: 自动位速率检测;
CA N
; 网关;
P
87
C
591
中图法分类号: U 469. 72 文献标识码: A
1 引 言
CAN( Contr oller Ar ea Netw ork ) 总线是现今
流行的一种较为先进的、性能出色的现场总线技
术。1991 年 9 月 CAN 协议技术规范由标准的 1. 2
版本修订为新的 2. 0 版本。在技术规范 2. 0
B
中给
出了标准的和扩展的2 种帧格式, 其间区别在于标
识符场的长度具有 11 位标识符的帧称之为标准
帧; 相应地, 包括 29 位标识符的帧称之为扩展
帧
[ 1]
。但现存的
CAN
1. 2 版本只支持标准帧格式,
不能识别扩展帧格式, 所以在实施过程中会响应错
误信息。为了保证采用不同版本的技术规范的
CAN 网络能够正常通信, 必须采用 CAN 协议网
关使网络互连。
CAN
协议网关实质上就是一个连
接异型网络的接口装置, 它综合了桥接器和路由器
的功能, 能在 OSI 参考模型的物理层、数据链路层
和应用层上对双方不同的协议进行翻译和解释。
笔者在参与研制的混合动力电动汽车光纤
CAN 网中, 美 国 Solectria 公司 的 电机 控制 器
DM O C445 和 DC-DC 变换模块 DC345 均使用标
准帧的标识符, 而整车控制系统的 ECU 采用了
扩展帧的标识符。为了确保
DMOC
445 和
DC
345
同各个 ECU 能正常进行 CAN 通信, 笔者设计出
了具有 2 个独立 CA N 控制器的网关, 从而达到
了 2 个不同版本的
CAN
协议网络通过该网关进
行互连的目的。
2 网关的硬件实现
2. 1 硬件结构框图
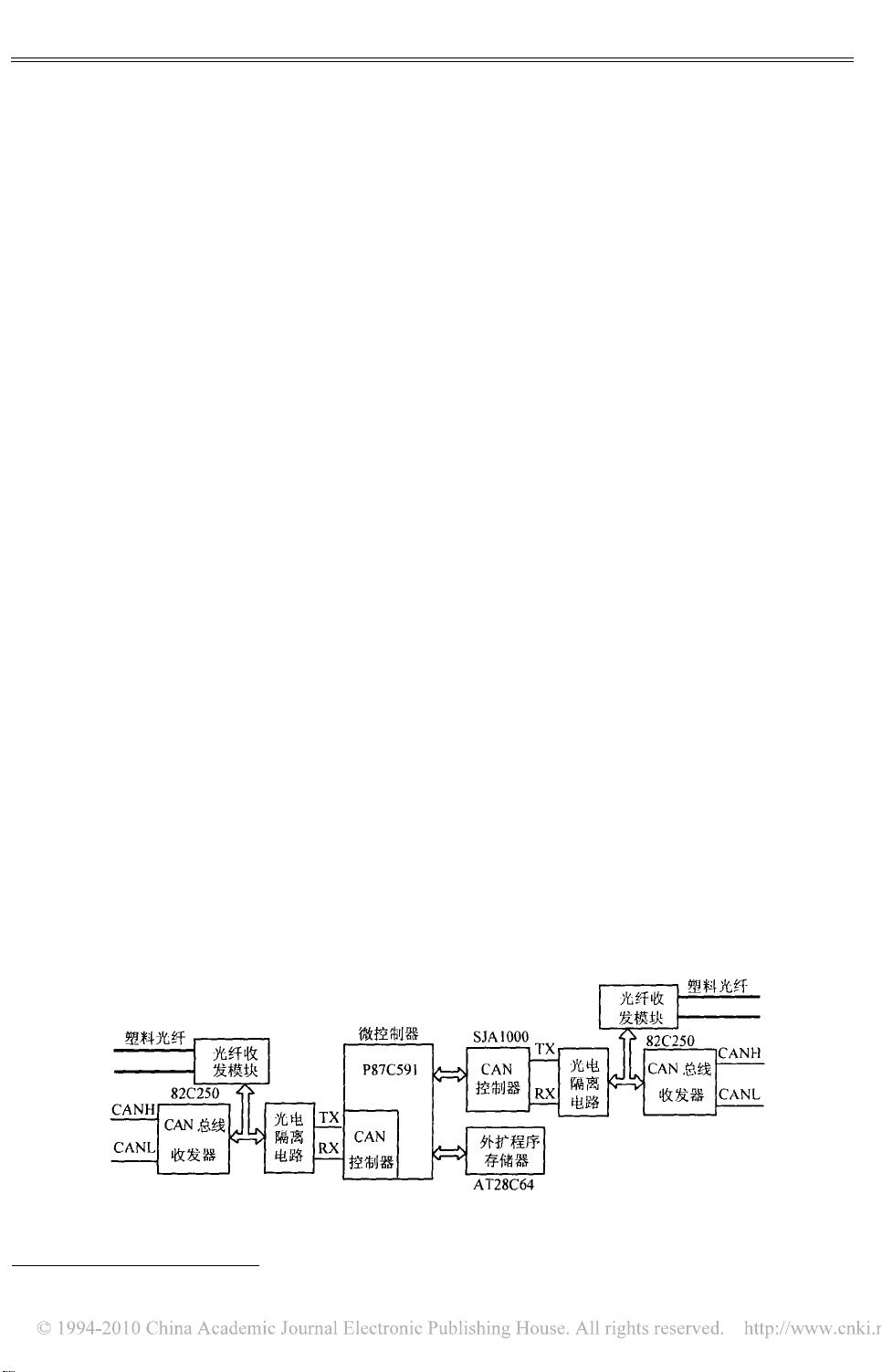
网关的硬件结构框图如图 1 所示。该网关的
核心是 2 个独 立的 CA N 控制器。其中一个为
Philips
公司的单片 8 位微控制器
P
87
C
591 片内的
图 1 网关的硬件结构框图
收稿日期: 2004- 09- 01.
作者简介: 张成才( 1979- ) , 男, 河南南阳人, 武汉理工大学自动化学院硕士研究生.
基金项目: 湖北省重大科技攻关项目( 2003
AA
103
B
) .
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐




huanghaijun2010
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
