FANUC机器人ROBOGUIDE中MODBUS TCP通信配置指南
版权申诉
本文档详细介绍了如何在FANUC机器人的仿真软件ROBOGUIDE中,通过MODBUSPOLL工具实现MODBUSTCP通信。主要涉及的步骤包括ROBOGUIDE的设置、系统变量配置、虚拟机器人IP设定、MODBUSPOLL软件的设置以及PLC一侧的相关设置。
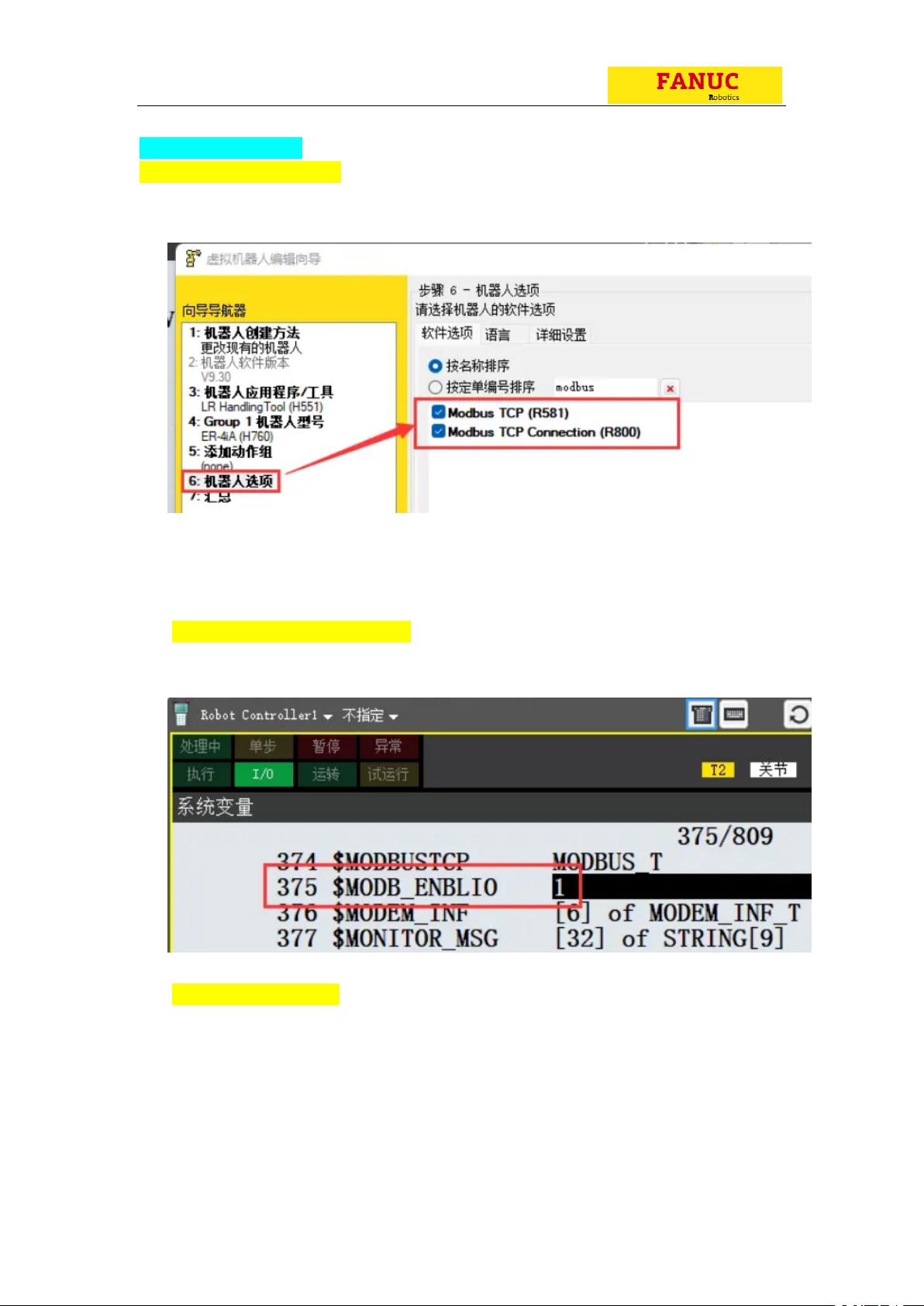
在ROBOGUIDE中的设置中,为了使用MODBUSTCP通信,需添加R581ModbusTCP和R800ModbusTCPConnection两个软件选项包。如果需要在实体机器人上实现此功能,购买时需向FANUC官方提出。此外,确保系统变量$MODB_ENBLIO设为1,这是开启MODBUSTCP通信的关键。
在虚拟机器人IP设置中,ROBOGUIDE中的IP应与运行软件的主机IP一致,或设置为回环地址127.0.0.1。完成设置后,必须重启控制柜以使配置生效。
MODBUSPOLL软件的配置包括设置TCP/IP连接,远程服务器IP应与虚拟机器人的IP相同,或者使用回环地址,同时确保访问端口与机器人配置匹配。在进行读写操作时,数字输入使用功能码16WriteMultipleRegisters,数字输出使用功能码04ReadInputRegisters(3x)。读写字数和地址必须与机器人设置一致,且在ModbusPoll中Address应设为0。
在PLC一侧,需使用相同的多重背景配合MB_CLIENT指令进行读写,并确保MB_DATA_LEN管脚的输入值与示教器设置一致。在进行PLC仿真时,推荐使用PLCSIMAdvanceV3.0,而非TIA自带的PLCSIM,因为前者更适用于此类通信。
MODBUSTCP协议主要用于传递数字量I/O数据,不涉及其他复杂参数。通过以上步骤,可以实现FANUC机器人与外部设备如PLC之间的有效通信。
FANUC 机器人在 ROBOGUIDE 中通过 MODBUS POLL 实现 MODBUS TCP 通信的具体方法
具体步骤可参考如下:
1. ROBOGUIDE 中的设置:
在 ROBOGUIDE 中使用 MODEBUS TCP 需要添加 R581 Modbus TCP 和 R800 Modbus TCP
Connection 两个软件选项包,如下图所示,
若实体机器人需要增加这两个软件选项包,需要在订购机器人时与 FANUC 官方提前说
明,
ROBOGUIDE 中系统变量的设置:
系统变量$MODB_ENBLIO 一定要设置为 1,否则在 ROBOGUIDE 中是无法实现 MODBUS
TCP 通信的,如下图所示,
虚拟机器人 IP 的设置:
ROBOGUIDE 中虚拟机器人的 IP 地址需要与运行当前该软件的 IP 地址保持一致。
下载后可阅读完整内容,剩余3页未读,立即下载
2576 浏览量
241 浏览量
523 浏览量
366 浏览量
262 浏览量
1651 浏览量
184 浏览量

AAA_自动化工程师
- 粉丝: 7139
- 资源: 3491
 我的内容管理
展开
我的内容管理
展开







最新资源
- MyEclipse6.0使用手册(免费版本)
- 超级实用的双面板布线技巧
- 视觉中文词汇识别的整体优先效应和词内核证原则:来自ERP的证据
- MyEclipse 6 Java 开发中文教程(01-10)
- 如何在Capture CIS配置本地元器件数据库
- 另存為按鈕.html
- ARM Cortex A8 Whitepaper
- Eclipse中文教程
- Oracle详细入门资料信息
- Oracle常用函数.txt
- 在线作业管理系统的设计与实现
- window的全部命令提示符.txt
- emacs快速指南.pdf
- Codec Engine Algorithm Creator User.pdf
- FPGA入门教程.pdf
- DIV+CSS完全解读
