PID算法详解:原理、调试与代码应用
需积分: 19 190 浏览量
更新于2024-09-13
收藏 534KB PDF 举报
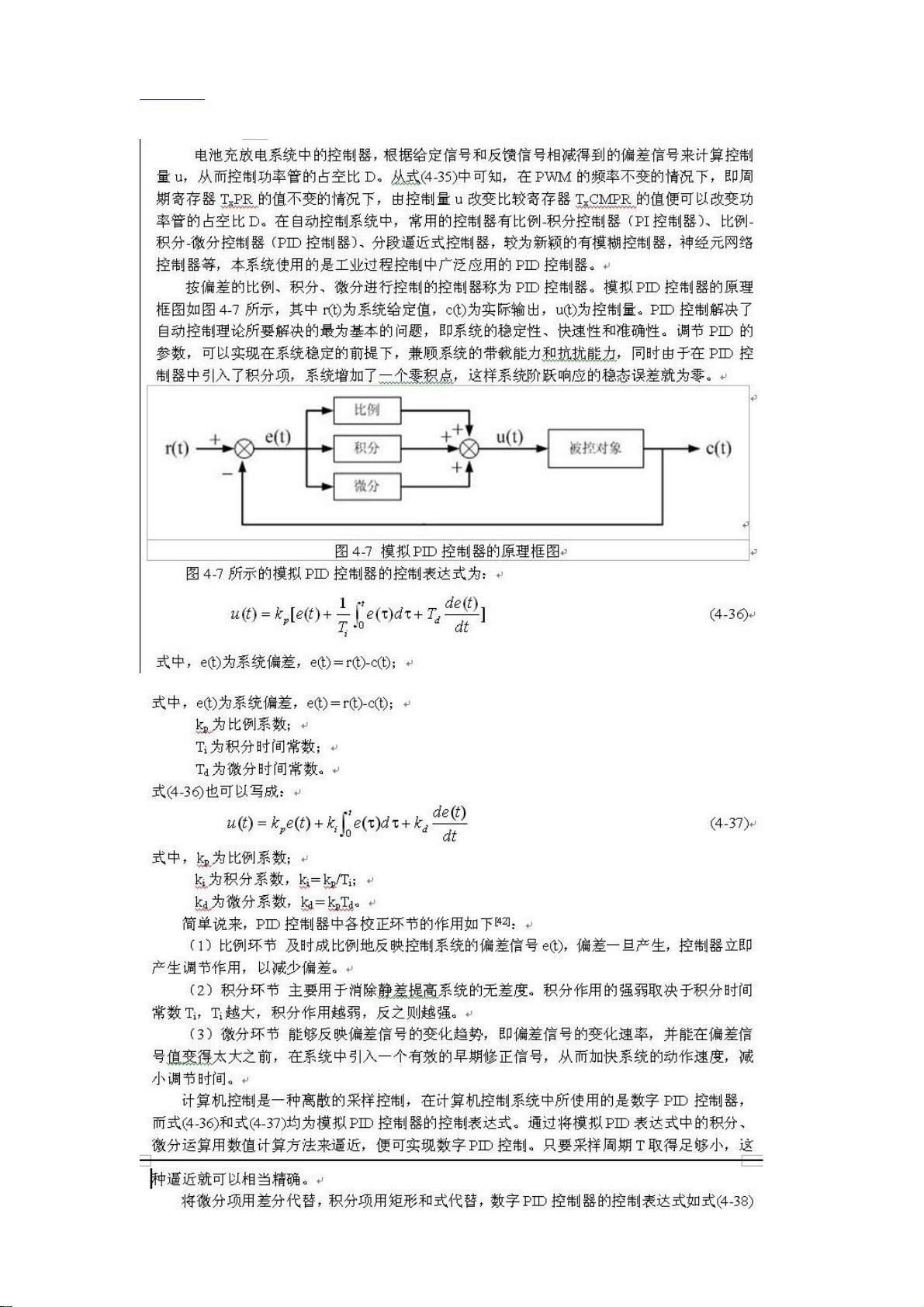
PID算法原理是一种经典的控制策略,全称为Proportional-Integral-Derivative (比例-积分-微分)控制,它广泛应用于工业自动化、机器人控制、航空航天等领域,以实现系统的精确调节。PID控制的核心思想是结合比例、积分和微分三个环节来补偿系统中的误差,确保输出稳定。
1. **PID控制原理**:
- **比例(P)控制**:根据当前的偏差(误差)值直接给出控制信号,快速响应,但可能导致过度调整。
- **积分(I)控制**:累计过去的所有误差,如果系统有残余误差,积分项会逐渐消除它,提高控制精度但可能引起超调。
- **微分(D)控制**:通过测量偏差的变化率,预测未来误差趋势,可以提前纠正,减少动态过程中的振荡。
2. **PID算法流程图**:
- PID控制通常包含输入、偏差计算、PID运算、控制增量计算、控制输出调整和执行动作等步骤。流程图展示了整个控制过程的逻辑顺序,包括偏差的实时更新、控制器计算调整量以及执行控制命令的决策。
3. **PID代码实现**:
- 代码展示了PID控制器的基本结构,包括变量定义(如比例系数Kp、积分常数Ki、采样周期T等)、误差变量ek及其历史值ek1和ek2的管理,以及PI调节算法的具体计算过程。通过调整Kp、Ti等参数,实现对输出信号的控制精度和稳定性要求。
4. **PID调试经验和参数调整**:
- PID参数的调整是一项关键任务,通常采用试凑法、临界比例度法或扩充临界比例度法等方法。调试时需要反复试验,找到最佳参数组合以达到最小化误差、稳定性和响应速度之间的平衡。参数设置过程中,比例度(P)用于快速响应,积分时间(Ti)决定消除误差的速度,微分时间(Td)则用于减少震荡。
5. **应用示例**:
- 在中断程序中,PID控制器在软启动后每20毫秒进行一次调节,误差ek被用于更新控制器的输出,当输出超过阈值时,会限制PWM(脉冲宽度调制)的占空比,保持电机或其他设备的电压或电流在合理范围内。
PID算法原理是一种实用且灵活的控制手段,通过精确调整各项参数,能够有效地解决许多控制系统中的动态调节问题。理解和掌握PID算法不仅有助于编写嵌入式控制代码,而且在实际工程应用中具有很高的价值。
PID 算法原理、调试经验以及代码
学习总结
2010-09-26 22:40:27 阅读 0 评论 0 字号:大中小 订阅
1、PID 控制原理
下载后可阅读完整内容,剩余5页未读,立即下载
2021-10-04 上传
2020-12-05 上传
2022-09-20 上传
2022-09-24 上传
2022-09-23 上传
2022-09-19 上传
2013-07-25 上传
2024-04-15 上传
300 浏览量

easyjinn
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
