PID控制在一阶倒立摆稳定系统中的应用与仿真
版权申诉
"本文详细探讨了基于PID控制的一阶倒立摆系统的理论与实践。通过PID控制器的设计和调整,实现对倒立摆的稳定控制。文章首先介绍了PID控制和编码器的基本理论,然后深入分析了一阶倒立摆的系统模型,包括微分方程模型、传递函数和状态空间方程的建立。在方案设计部分,讨论了比例(P)、积分(I)和微分(D)三个控制成分的作用,以及它们如何协同工作以改善系统性能。
在系统模型建立环节,作者阐述了一阶倒立摆的动态特性,并利用MATLAB软件构建了相应的控制模型。接着,文章详细介绍了PID参数的确定过程,这是实现有效控制的关键步骤。通过Simulink仿真模块,作者展示了如何进行系统仿真,并分析了仿真结果。此外,还探讨了如何使用软件编程来实现这一控制策略。
在系统调试和结果分析章节,文中提到了实际系统实验中遇到的问题和解决方案,以及对控制效果的评估。尽管PID控制器能够稳定摆杆角度,但无法同时控制小车位置。因此,作者提出了采用现代控制理论,如单输入多输出(SISO)控制算法,以改进系统稳定性,同时控制摆杆角度和小车位置。
结论部分指出,一阶倒立摆作为控制理论研究的经典案例,具有很高的研究价值。它不仅涉及非线性系统控制、鲁棒性、实时性等复杂问题,而且在机器人技术、计算机控制等领域有广泛应用。因此,对倒立摆的深入研究有助于推动控制理论和技术的发展。"
关键词:倒立摆;PID控制;MATLAB仿真;控制理论;单输入多输出;系统稳定性
误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误
差的作用就应该是零。这就是说,在控制器中仅引入 “比例”项往往是不够的,比例项的作
用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样
具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而
避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制
器能改善系统在调节过程中的动态特性。
软件部分实现在 PID控制器各校正环节中,比例环节成比例地反映控制系统的偏差信
号,偏差一旦产生,控制器立即产生控制作用,以减少偏差;积分环节主要用于消除稳态
误差,提高系统的型别,积分作用的强弱取决于积分时间常数Ti,Ti越大,积分作用越弱,
反之则越强;微分环节反映信号的变化趋势,即变化速率,并能在偏差信号值变得太大之前
在系统中引入一个有效地早起修正信号,从而加快系统的动作速度,减小调节时间。
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。其输入 与输出
的关系为:
(1.1)
式中积分的上下限分别是 和 ,因此它的传递函数为:
比例作用下,通过现场试验找到等幅震荡的过渡过程,记下此时的比例度和等幅振
荡周期,再通过简单的计算求出衰减振荡时控制器的参数。
3 系统模型建立
3.1 一阶倒立摆的微分方程模型
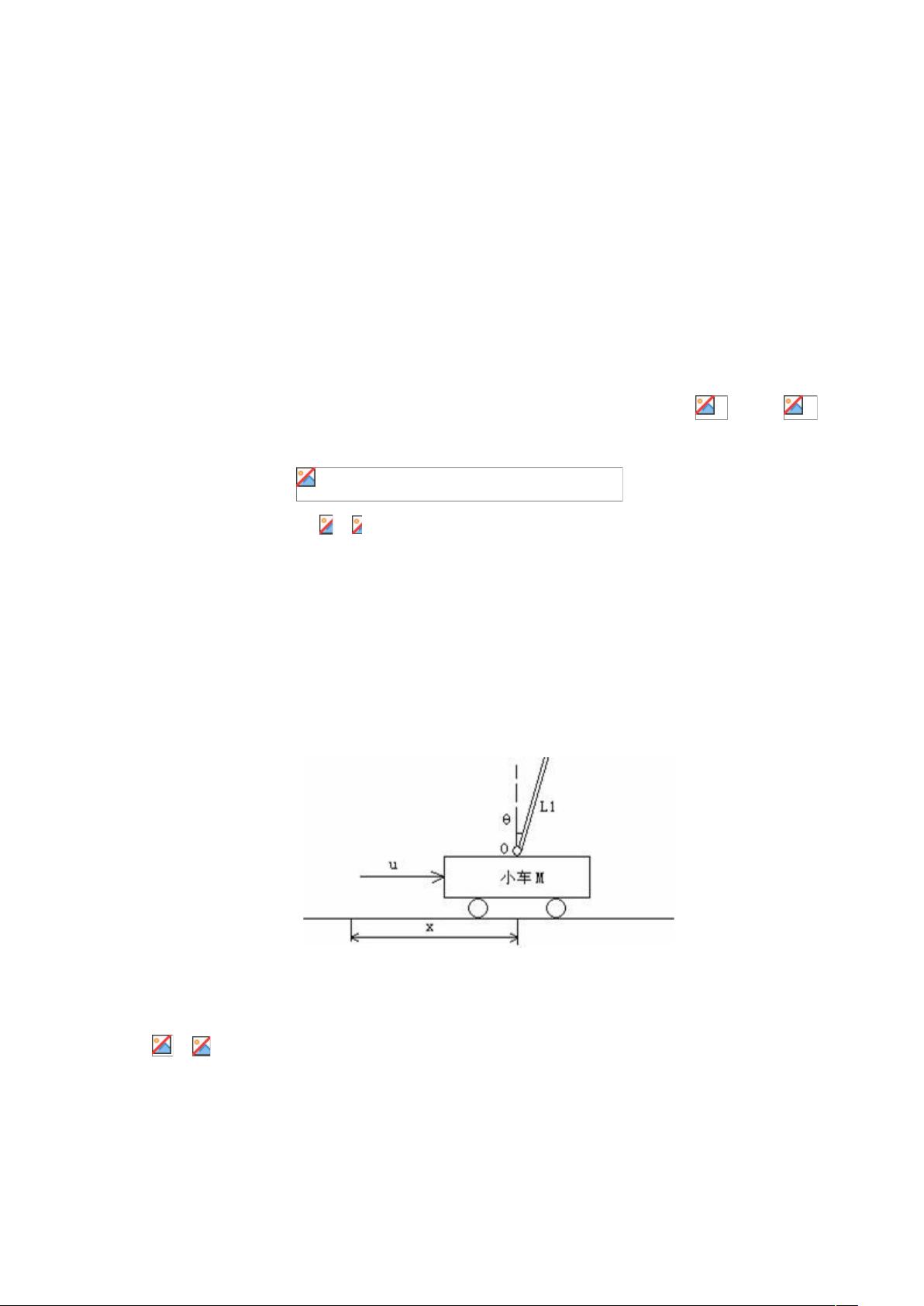
在忽略了空气流动,各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统
如下图2.2所示
图2.2 单级倒立摆模型示意图
下面我们对这个系统作一下受力分析。下图2.3是系统中小车和摆杆的受力分析图。其
中, 和 为小车与摆杆相互作用力的水平和垂直方向的分量。
注意:在实际倒立摆系统中检测和执行装置的正负方向已经完全确定,因而矢量方向
定义如图,图示方向为矢量正方向。
剩余20页未读,继续阅读
2022-03-22 上传
2021-09-18 上传
2021-09-24 上传
2022-06-03 上传
2022-10-23 上传
2021-12-02 上传
2022-06-26 上传
2022-07-05 上传
2023-08-29 上传

智慧安全方案
- 粉丝: 3832
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
