STM32 GPIO入门教程:使用HAL库
需积分: 10 133 浏览量
更新于2024-09-05
收藏 113KB PDF 举报
"GPIO Operations using HAL.pdf 是一份关于在STM32F4xx微控制器上使用HAL库进行GPIO操作的基础教程。这份文档适用于初学者,通过STM32CubeMX工具生成必要的配置文件来启用GPIO引脚。教程中,作者使用了NUCLEO-F103RB开发板、Keil uVision5集成开发环境、ST-Link USB驱动以及STM32CubeMX工具。"
在STM32微控制器中,GPIO(通用输入/输出)是系统与外部世界交互的重要接口,可以设置为输入或输出模式,用于控制LED、读取传感器数据等。HAL库(Hardware Abstraction Layer,硬件抽象层)是意法半导体提供的一个库,它提供了一组与具体硬件无关的函数,简化了开发者对STM32系列芯片的编程。
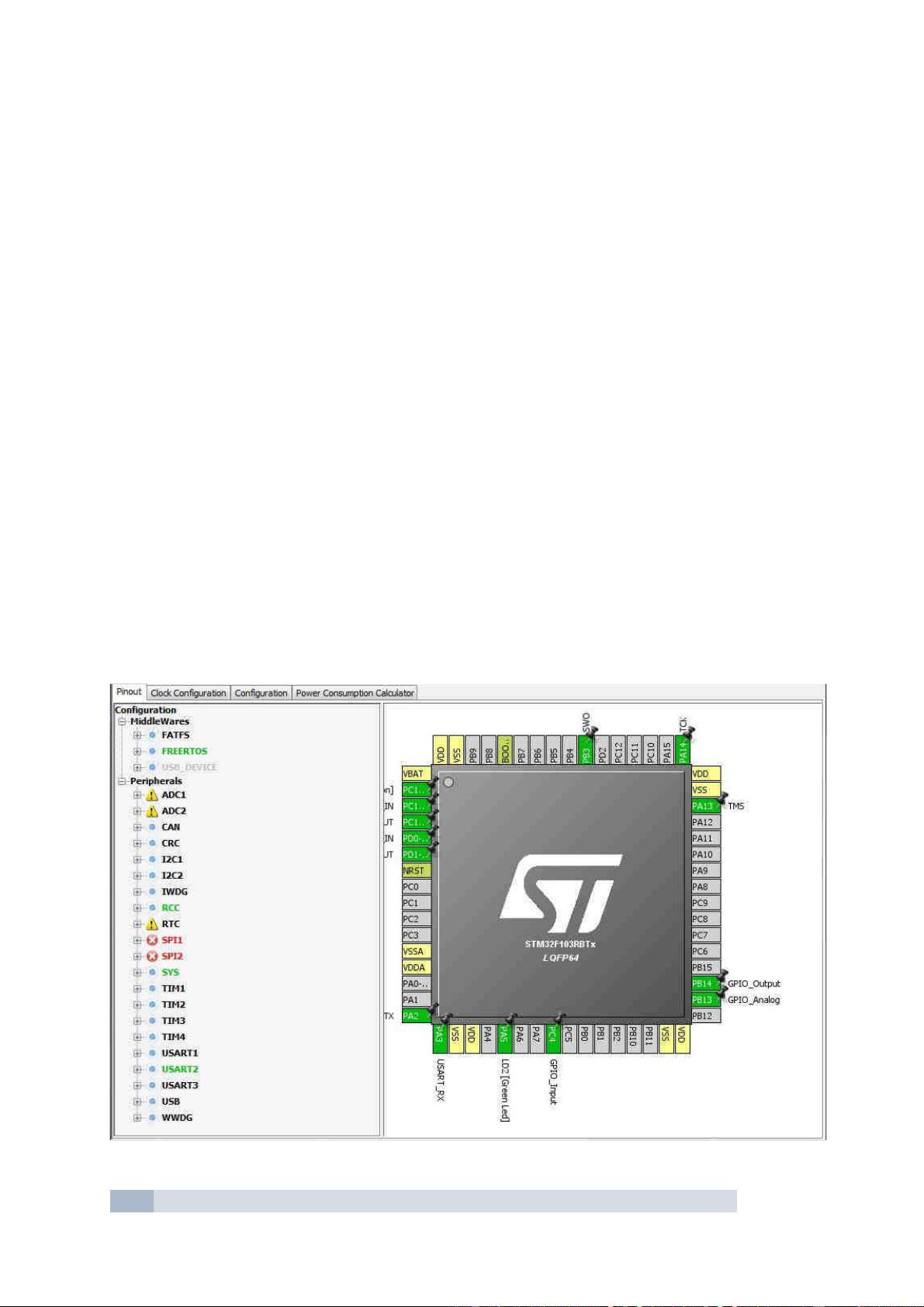
在本教程中,首先需要使用STM32CubeMX创建项目并选择Nucleo-F103RB开发板。接着,开启FreeRTOS实时操作系统支持,配置RCC(Reset and Clock Control,复位和时钟控制),设置HSE(高速外部时钟)和LSE(低速外部时钟)为晶体振荡器。然后,启用USART2(通用同步/异步收发传输器)在异步模式下工作,通常用于串行通信。选择GPIO,如PB13、PB14和PC4,分别设置为输出或输入。
生成代码后,在Keil uVision5中打开项目,可以看到STM32CubeMX自动生成的初始化代码,其中`MX_GPIO_Init(void)`函数是关键部分,负责初始化GPIO引脚。在这个函数中,HAL库的函数将被调用来配置GPIO的模式、速度、推挽/开漏、上拉/下拉等特性。
例如,`HAL_GPIO_Init()`函数可能包含以下步骤:
1. 选择GPIO端口和引脚:`GPIOx`(如GPIOB)和`Pin`(如PIN13)。
2. 配置GPIO模式:输入(GPIO_MODE_INPUT)、推挽输出(GPIO_MODE_OUTPUT_PP)、开漏输出(GPIO_MODE_OUTPUT_OD)等。
3. 设置GPIO速度:低(GPIO_SPEED_FREQ_LOW)、中(GPIO_SPEED_FREQ_MEDIUM)、高(GPIO_SPEED_FREQ_HIGH)。
4. 配置GPIO的上拉/下拉:无(GPIO_NOPULL)、上拉(GPIO_PULLUP)、下拉(GPIO_PULLDOWN)。
5. 最后,调用`HAL_GPIO_Init(GPIOx, &GPIO_InitStruct);`来完成GPIO的初始化。
通过修改这些配置,你可以根据需求灵活地控制GPIO引脚。例如,如果你需要使用PB13作为LED的输出,就需要将其配置为推挽输出,并设置适当的初始状态。同时,如果PB14用于读取传感器信号,则应设为输入模式,并可能需要添加适当的上拉或下拉电阻。
本教程还提到了更新教程的信息,意味着作者可能会发布更多关于STM32的最新内容,建议关注其提供的链接以获取最新资料和示例。通过这个基础教程,读者将能够理解如何使用STM32CubeMX和HAL库来快速有效地进行GPIO操作,为后续的STM32开发打下坚实的基础。
STM32 Tutorial NUCLEO F103RB GPIO Pins
V1.0.1 – created on
20.05.2016
simon burkhardt page
1
/
5
GPIO Operations on STM32 Microcontrollers using HAL
You can use the STM32CubeMX tool to create the necessary config. files to enable the GPIO Pins.
In this tutorial I’m going to explain how you can modify the generated GPIO configs and add additional
GPIOs.
This tutorial uses the following equipment:
- NUCLEO-F103RB Board
- Keil uVision 5 with the necessary packages for Nucleo boards installed
- STLink USB Driver
- STM32CubeMX
STM32CubeMX
Generating the config. files from STM32CubeMX.
1. Open STM32CubeMX and open a new project.
2. Select the Nucleo-F103RB from the Borards tab
3. Enable FreeRTOS
4. Set the RCC (HSE & LSE) to Crystal/Ceramic Resonator
5. Enable the USART2 port in Asynchronous mode
6. Set any GPIO to Output or Input (I am using PB13, PB14 and PC4)
7. Go to Project > Generate code
8. Enter a project name and select MDK-ARM V5
9. Generate the code and open the project in Keil uVision
Now let’s see what the code generator did
187
void
MX_GPIO_Init(
void
)
Announcement: check out the updated tutorials
https://github.com/mnemocron/STM32-Tutorial
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-11 上传
2020-06-03 上传
2023-06-06 上传
2023-07-11 上传
2023-06-04 上传
2023-07-12 上传
2023-07-22 上传
2023-07-17 上传
2023-05-23 上传









