气压驱动四自由度教学仿真机械手设计与PLC控制
版权申诉
190 浏览量
更新于2024-07-01
收藏 1.16MB DOCX 举报
定位机构等部分组成。执行机构是机械手进行工作的主体,如手臂、手腕和手爪等,用于实现对物体的抓取和操作。驱动系统则是提供动力的装置,例如气压驱动系统,它通过压缩空气来驱动执行机构进行运动。控制系统是机械手的大脑,负责接收指令、处理信息并控制机械手的运动,确保其按照预设的程序准确执行任务。定位机构则用于保证机械手在空间中的精确位置和姿态。
1.3机械手的工作原理
机械手的工作原理通常是通过传感器获取外部环境信息,控制器根据这些信息解析出相应的动作指令,然后驱动系统接收到指令后驱动执行机构进行动作,如伸缩、旋转等。在这个过程中,机械手能够实现精确的位置控制和力矩控制,从而实现对物体的稳定抓取和灵活操作。
2机械手的机构设计
2.1气压机械手的示意图
气压驱动的机械手通常包含一系列的气缸,如直线气缸用于实现手臂的伸缩,旋转气缸用于实现手臂的回转。设计时,需要考虑气缸的布置、尺寸选择以及与执行机构的连接方式。
2.2机械手自由度的定义
自由度是指机械手可以独立运动的轴的数量,四自由度机械手意味着它能够在垂直方向(升降)、水平方向(伸缩)和两个旋转方向(回转)上独立运动。
2.3机械手气缸的分析
在设计中,气缸的选择至关重要。要考虑气缸的推拉力、速度、响应时间和耐用性等因素,以满足机械手的负载需求和动作速度要求。
2.4机械手爪子的选择
爪子是机械手与物体直接接触的部分,其设计应考虑被抓取物体的形状、大小和材质,以确保抓取的稳定性和安全性。常见的有吸盘式、夹持式等不同类型的抓手。
2.5机械手手臂的具体设计方案
手臂的设计包括伸缩、升降和回转等部分,每个部分都需要精心设计以确保运动的平滑和精准。例如,伸缩设计需考虑气缸的行程和密封性能,升降设计需考虑稳定性,而回转设计则需考虑旋转精度和范围。
3气压回路设计
气压回路设计涉及到气源处理、气路布局、调压阀、电磁阀等组件的选择和配置,以保证气压系统的稳定性和效率。同时,需要考虑到安全因素,如设置压力保护装置,防止因气压过高或过低造成的损坏。
4机械手的PLC控制设计
4.1PLC的概述
PLC(Programmable Logic Controller)是一种可编程逻辑控制器,用于实现设备或系统的自动化控制。它具有编程灵活、抗干扰能力强、易于扩展等特点,是现代工业自动化中的核心控制设备。
4.2PLC梯形图的程序设计
梯形图是PLC编程的常用语言,通过编程实现对机械手各个动作的逻辑控制。包括输入信号的检测、处理和输出信号的控制,确保机械手按照预定的顺序和条件执行任务。
4.2.1PLC机械手的流程图
流程图是描述控制逻辑的图形化工具,用于表示机械手的工作流程,如手臂的伸缩、升降和回转的动作顺序。
4.2.2PLC机械手的梯形图
梯形图编程中,通过逻辑门、定时器、计数器等元素,将机械手的控制逻辑转化为指令,实现对气缸的精确控制。
总结,这个毕业设计项目旨在通过气压驱动的四自由度机械手,提供一个教学演示平台,使学生能够理解和掌握机械手的基本概念、设计方法以及PLC控制系统的工作原理。设计过程中涵盖了机械结构、气压传动、自动化控制等多个方面的知识,对提高学生的实践能力和创新能力具有积极的促进作用。
可修改编辑
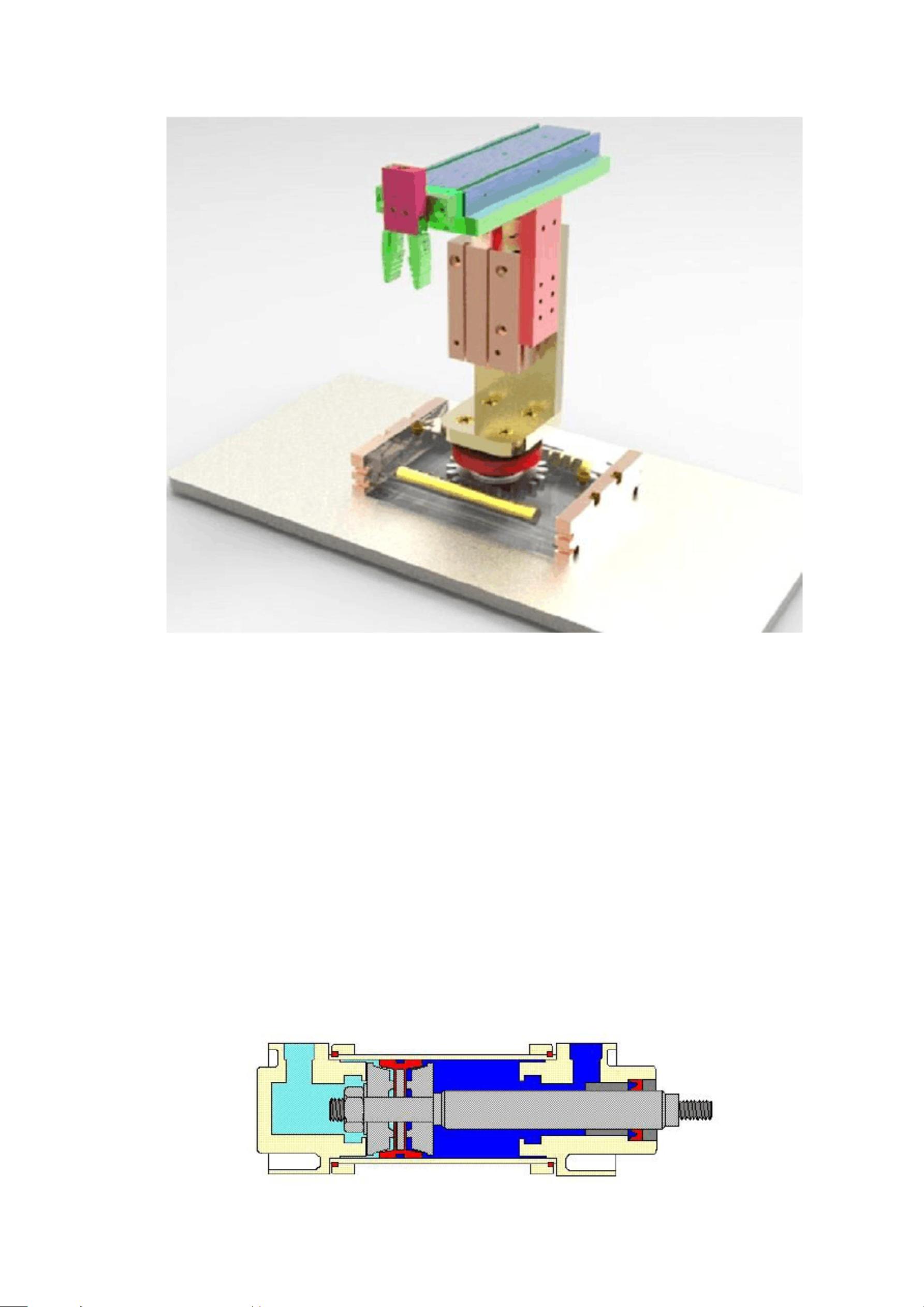
图 3 气压驱动式四自由度教学仿真机械手渲染效果图
根据机械原理,机构具有确定运动时所必须给定的独立运动参数的数目(亦即为了
使机构的位置得以确定,必须给定的独立的广义坐标的数目),称为机构自由度(degree
of freedom of mechanism),其数目常以 F 表示。
本气压驱动式教学仿真机械手,具有四个自由度:手臂的伸缩;机身的回转;机身
的升降;手爪的张合。
2.3 机械手气缸的分析
精品 doc
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-12 上传
2022-07-12 上传
2022-07-12 上传
2023-09-02 上传
2023-09-02 上传

G11176593
- 粉丝: 6897
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
