基于STC89C52单片机的自动避障小车设计详解
152 浏览量
更新于2024-06-24
收藏 203KB DOC 举报
该篇毕业设计论文主要探讨的是基于单片机的自动避障小车的设计,针对的是数理与信息工程学院的《单片机原理及应用》期末课程。论文的作者是一名电子信息工程专业的学生,通过这次设计任务,他们旨在实践和深化对单片机技术的理解,并将其应用于实际项目中。
在引言部分(第1节),作者首先阐述了研究背景,可能提及当前小车自动化技术的发展趋势,以及单片机在机器人领域的广泛应用,以此来突出设计课题的重要性和紧迫性。接着,他们详细介绍了设计任务和主要内容,明确了目标是开发一个能自主感知环境并避开障碍物的小车,包括硬件电路设计和软件算法实现。
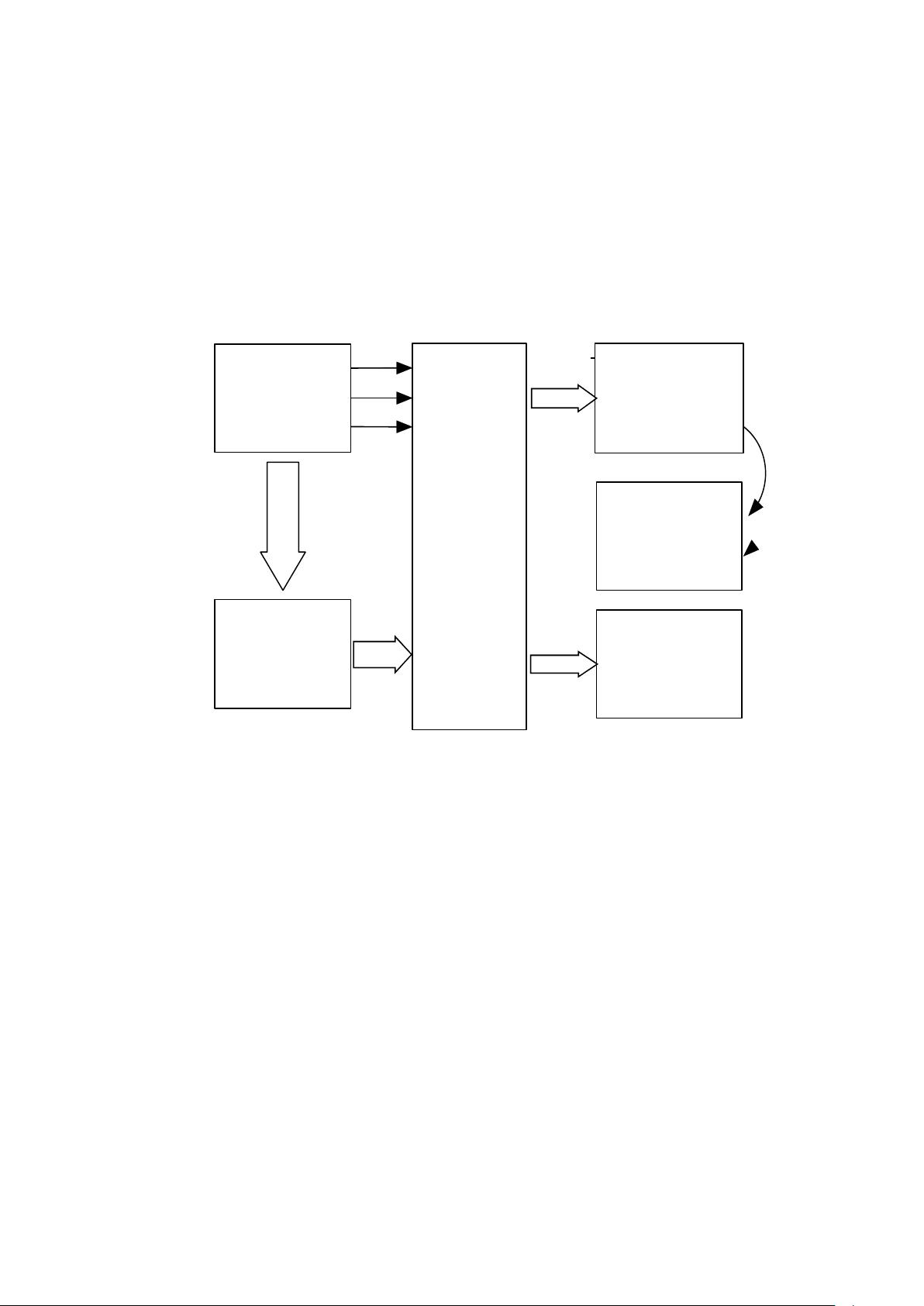
硬件电路设计占据了论文的主体部分,包括系统原理组成框图,展示了整个系统的架构。2.1节详细描述了系统由STC89C52单片机为核心的主控模块、稳定的电源和稳压模块、用于传感器数据采集的逻辑模块、各种传感器(如红外或超声波传感器)构成的感测模块、连接模块确保信号传输,以及电机驱动模块来控制小车运动。此外,还提到了一个显示模块,用于实时反馈小车的状态和避障结果。
软件设计(第3节)则是论文的关键部分,可能涉及到编写中断服务程序、避障算法的设计(如PID控制器或机器学习算法),以及如何将这些硬件模块的操作指令转化为控制指令。这部分内容可能会涉及如何处理传感器输入,根据障碍物的距离调整小车的行驶路径,以及如何实现与人机交互的界面设计。
这篇论文通过实际操作,展示了单片机在自动避障小车中的关键作用,不仅锻炼了学生的硬件设计能力,也考验了他们的编程和算法优化技能。设计过程中的挑战和解决方案,以及最终成果的展示,都是该论文的核心内容。
4
第 2 节 系统主要硬件电路设计
2.1 系统原理组成框图
图 2-1 系统原理组成框图
2.2 系统主控模块电路
2.2.1 STC89C52 单片机性能优点:
课堂上我们学习的是 8051 单片机,但实际应用中现在我们是不会再用 8051
单片机了。学习 8051 单片机是学习一种方法,学习单片机的基本结构,指令。
现在单片机种类繁多,各有各的优点,结合具体情况恰当选择单片机型号也是非
常重要的,在此系统中采用 STC89C52 为主控模块芯片,选此芯片的理由是:
01. 与 MCS-51 单片机完全兼容:指令兼容,引脚兼容;
02. 高保密性:无法读出,因此无法解密;
03. 超强抗干扰能力:电源、I/O 接口、时钟均有抗干扰措施;
04. 高可靠性:
① 宽电压范围,不怕电源波动 5V 产品 3.4V~6V,;
② 宽温度范围:-40
。
C~85
。
C;
Ö÷
¿Ø
Ä£
¿é
¸Ð²âÄ£¿é
Â߼ģ¿é
µç»úÇý¶¯Ä£¿é
С³µµç»ú
Òº¾§ÏÔʾģ¿é
剩余18页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-09 上传
2023-07-06 上传
2023-07-09 上传
177 浏览量
2023-07-09 上传
2024-01-16 上传

智慧安全方案
- 粉丝: 3851
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火星任务数据分析与Web抓取挑战
- Shiro框架快速入门教程与实例演示
- Calm Wallpaper HD新标签页扩展:个性化壁纸体验
- Redic:Ruby轻量级Redis客户端入门指南
- C语言实战项目:电话号码识别源码解析
- 打造虚拟现实:3D展厅展览模型设计与应用
- UCEMA 计算机基础教程介绍
- 掌握kmeans聚类:Python与Matlab代码模板解析
- React应用测试指南:酶和moxios实践教程
- 深入研究 KotlinSpringBoot REST API开发
- C语言实战项目:结合OpenCV与MFC的Hook技术源码分享
- STM32F103综合实验程序:TFTLCD与温湿度传感器控制
- 《制度汇总调查表》:一致性与社会性的管理资源
- mdf文件修复工具:有效恢复sqlserver数据
- 微信小程序开发: Persona性格测试应用
- 木桥3D结构模型:设计3D桥模型的应用
