深度自编码器实现无监督电动机故障检测
版权申诉
163 浏览量
更新于2024-09-11
收藏 5.71MB PDF 举报
本文档"Unsupervised Electric Motor Fault Detection by Using Deep Autoencoders"由Emanuele Principi、Damiano Rossetti、Stefano Squartini(IEEE高级会员)和Francesco Piazza(IEEE高级会员)共同撰写,主要关注电动机故障的无监督检测方法。在传统的电机故障诊断中,通常依赖于经验丰富的操作员进行测试,但随着技术的发展,自动化检测的需求日益增长。
作者提出了一种新颖的无监督故障诊断策略,利用深度自动编码器(Deep Autoencoders)。这种方法旨在解决电动机故障检测的问题,以往的研究虽然已广泛应用深度神经网络,但在无监督学习环境下并未被广泛采用。该研究的重点在于利用振动信号来识别电机故障,通过加速度传感器收集信号并提取出Log-Mel系数作为特征。这些特征仅基于正常运行数据训练自动编码器,即排除了包含故障的数据,以此来区分正常运行与异常情况。
研究者评估了三种不同的自动编码器架构:多层感知器(Multi-layer Perceptron, MLP)自动编码器,以及卷积神经网络(Convolutional Neural Network, CNN)自动编码器。MLP自动编码器因其结构简单,适用于处理结构化数据;而CNN自动编码器则适用于处理时序或图像数据,其局部连接和权重共享特性有助于捕捉复杂模式。此外,可能还考虑了循环神经网络(Recurrent Neural Networks, RNNs),这类网络特别适合处理时间序列数据,可能用于分析电机运行中的动态变化。
通过无监督学习,这种方法能有效地在没有预先标记的故障数据的情况下,学习电机正常运行的固有模式。当新的振动信号表现出显著的差异或偏离正常模式时,系统能够自动识别出潜在的故障。这种方法具有显著的优势,如无需大量标注数据,可以降低人工成本,提高检测效率,并且在早期阶段就能发现故障,从而提前进行维护,减少生产停机时间。
这篇论文不仅推动了电动机故障诊断技术的进步,而且展示了深度自动编码器在无监督场景下的潜力,为工业生产线上电机健康监测提供了创新的解决方案。
3
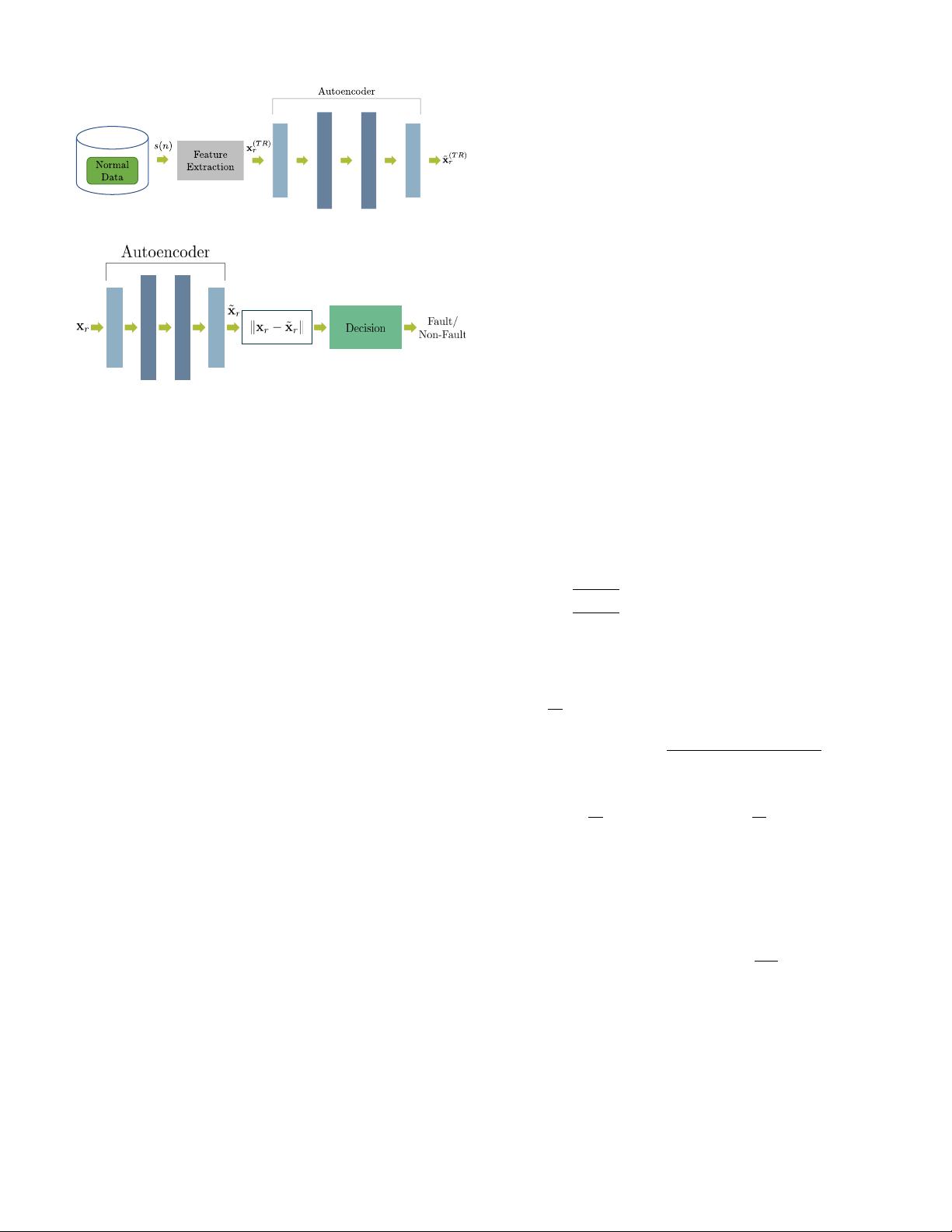
(a) Training phase.
(b) Fault detection phase.
Fig. 1. Block scheme of the proposed approach. In the training phase (a),
the superscript (T R) distinguishes a feature vector of the training phase from
the one of the test phase shown in (b).
from the measured vibration signals. The three architectures
have been evaluated by using a dataset created by the authors
and compared to the OC-SVM [33]. The results show that
the proposed neural networks-based algorithm outperforms the
OC-SVM approach, and that the MLP autoencoder provides
the overall highest performance.
III. PROPOSED METHOD
The block scheme of the proposed method is shown in
Fig. 1. Both in the training and in the detection phase, the
input signal is processed by the feature extraction stage,
where Log-Mel coefficients are calculated. Log-Mels are then
processed by a deep autoencoder, a neural network that is
trained to reconstruct its input [34]. During the training phase,
the autoencoder is trained by using only normal data, i.e.,
sequences that do not contain faults (Fig. 1a). In the detection
phase, the autoencoder takes as input the features extracted in
the feature extraction stage, but this time the signal can contain
a fault or not. In the first case, the reconstruction error is
expected to assume considerably higher values than the second
case. The “Decision” stage marks the input as a “Fault” if the
reconstruction error exceeds a certain threshold, otherwise as
“Non-Fault”. The remainder of this section describes in detail
the stages of the algorithm.
A. Feature extraction
The feature extraction stage reduces the dimensionality of
the input data, while retaining significant characteristics that
allow to discriminate whether an input sequence contains a
fault or not. In this paper, we used Log-Mel coefficients, a
set of spectral features that have been widely used for speech
applications [35], [36], but that have also been successfully
applied to the analysis of vibration signals [37], [38].
The first step for extracting Log-Mel coefficients is dividing
the input signal in frames of length 600 ms and overlapped by
300 ms (i.e., 50%). Overlapping two consecutive frames by
50% results in a good compromise between time-resolution
and computational requirements of the algorithm.
Denoting with s(n) the input signal and with w(n) the
window function, the r-th frame s
r
(m) of s(n) is defined
as:
s
r
(m) = s(rR + m)w(m), −∞ < r < ∞, 0 ≤ m ≤ L − 1,
(1)
where R is the frame step and L is the length of the window
w(n). A common choice for the window function is the
Hamming window, whose form is the following [39]:
w(n) =
0.54 − 0.46 cos (2πn/L) , 0 ≤ n ≤ L − 1,
0, otherwise.
(2)
The second step from extracting Log-Mels is calculating the
N-points Discrete Fourier Transform of s
r
(m):
S
r
(k) =
L−1
X
m=0
s
r
(m)e
−j(2π/N)km
, (3)
where k denotes the frequency bin.
Log-Mel coefficients are obtained by filtering S
r
(k) with
a filterbank composed of B triangular filters equally spaced
along the mel-scale, and then calculating the logarithm of the
energy in each band. The b-th triangular filter h
b
(k) of the
filterbank is calculated as follows [40]:
h
b
(k) =
0, k < f
b−1
,
k−f
b−1
f
b
−f
b−1
, f
b−1
≤ k < f
b
,
f
b+1
−k
f
b+1
−f
b
, f
b
≤ k < f
b+1
,
0 k ≥ f
b+1
,
b = 1, 2, . . . , B,
(4)
where the boundary frequencies f
b
are obtained as:
f
b
=
N
f
s
Mel
−1
(Mel(f
low
)+
+b ·
Mel(f
high
) − Mel(f
low
)
B + 1
, (5)
with
f
0
=
N
f
s
f
low
, f
B+1
=
N
f
s
f
high
, (6)
f
s
is the sampling frequency, and f
low
and f
high
are respec-
tively the lowest and highest frequencies of the filterbank. The
transformation Mel(·) and its inverse Mel
−1
(·) respectively
map a linear frequency into the mel scale and vice-versa, and
they are defined as follows [41]:
Mel(f) = 2595 log
10
1 +
f
700
, (7)
Mel
−1
(f) = 700
h
10
(f/2595)−1
i
. (8)
A single Log-Mel coefficient is then given by:
x
r
(b) = log
N−1
X
k=0
h
b
(k)|S
r
(k)|
2
!
. (9)
Since the filterbank is composed of B filters, the final feature
vector is structured as follows:
x
r
= [x
r
(1), . . . , x
r
(B)]
T
. (10)
剩余10页未读,继续阅读
2015-06-16 上传
2021-03-19 上传
2024-07-11 上传
2024-07-11 上传
2020-03-01 上传
2021-11-21 上传
2021-03-17 上传
2021-12-15 上传
2022-12-02 上传

Fun_He
- 粉丝: 19
- 资源: 104
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
