ARM AMBA协议详解与演化
需积分: 13 45 浏览量
更新于2024-07-09
收藏 1.3MB PDF 举报
"【极术公开课】Jay Wu-AMBA 协议.pdf 是一份关于AMBA协议的课程资料,涵盖了AMBA协议的历史演变、主要组件以及相关扩展协议的介绍。"
AMBA(Advanced Microcontroller Bus Architecture)协议是ARM公司开发的一系列开放标准,用于微处理器之间的片上通信。这份资料详细介绍了AMBA协议的发展历程和主要特点。
1. **AMBA协议历史与版本**:
- AMBA协议始于1997年,最初是为了解决低带宽外设的连接问题,推出了Advanced Peripheral Bus (APB)。
- 1999年,AMBA2引入了Advanced High-performance Bus (AHB),支持更高的性能和多主控器环境。
- 2003年,AMBA3进一步升级,加入了AXI(Adv.eXtensible Interface),以支持更灵活的数据传输,如独立的地址/数据阶段、突发传输和多未完成请求。
- 随后,AMBA4引入了Advanced Coherency Extensions (ACE),提供了跨多核集群的系统范围一致性。
- AMBA5则带来了Coherent Hub Interface (CHI)等新特性,以应对更高的性能需求和可扩展性,并引入了对低功耗和电源管理的支持。
2. **AMBA协议组件**:
- APB:面向低带宽外围设备,适用于简单、低速的系统组件。
- AHB:为高性能主控器设计,支持64/128位数据宽度和多主控器配置,还有针对单主控器的简化版本AHB-Lite。
- AXI:作为AXI3和AXI4的基础,支持分离的地址/数据阶段、突发传输、多个未完成的地址和乱序响应,适用于各种复杂系统。
- ACE:在AXI基础上增加了系统一致性,特别适用于多核环境。
- CHI:为实现可扩展的协调一致性协议而设计,具有分层架构。
- ATB (Adv.Trace Bus) 和DTI (Distributed Translation Interface) 用于调试和翻译接口,如与PCIe Root Complex的交互。
- LTI (Local Translation Interface) 用于I/O主控器和TBU之间的连接,而LPI (Low-power interface for clock) 则是针对低功耗场景设计的接口。
3. **AMBA协议的演进**:
- 随着技术的进步,AMBA协议不断演进以满足更高的带宽需求、系统一致性、可扩展性和低功耗要求。例如,AHB5和APB3/4提升了性能,而AXI5和CHI.C则扩展了接口功能。
- DTI在AMBA5中扮演重要角色,它改善了与外部接口如PCIe的通信,支持ATS(Address Translation Services)功能。
这份资料深入探讨了AMBA协议的各个方面,对于理解嵌入式系统中的片上通信和设计有着极大的帮助,适合那些想要深入了解AMBA协议及其在现代SoC设计中应用的学习者。
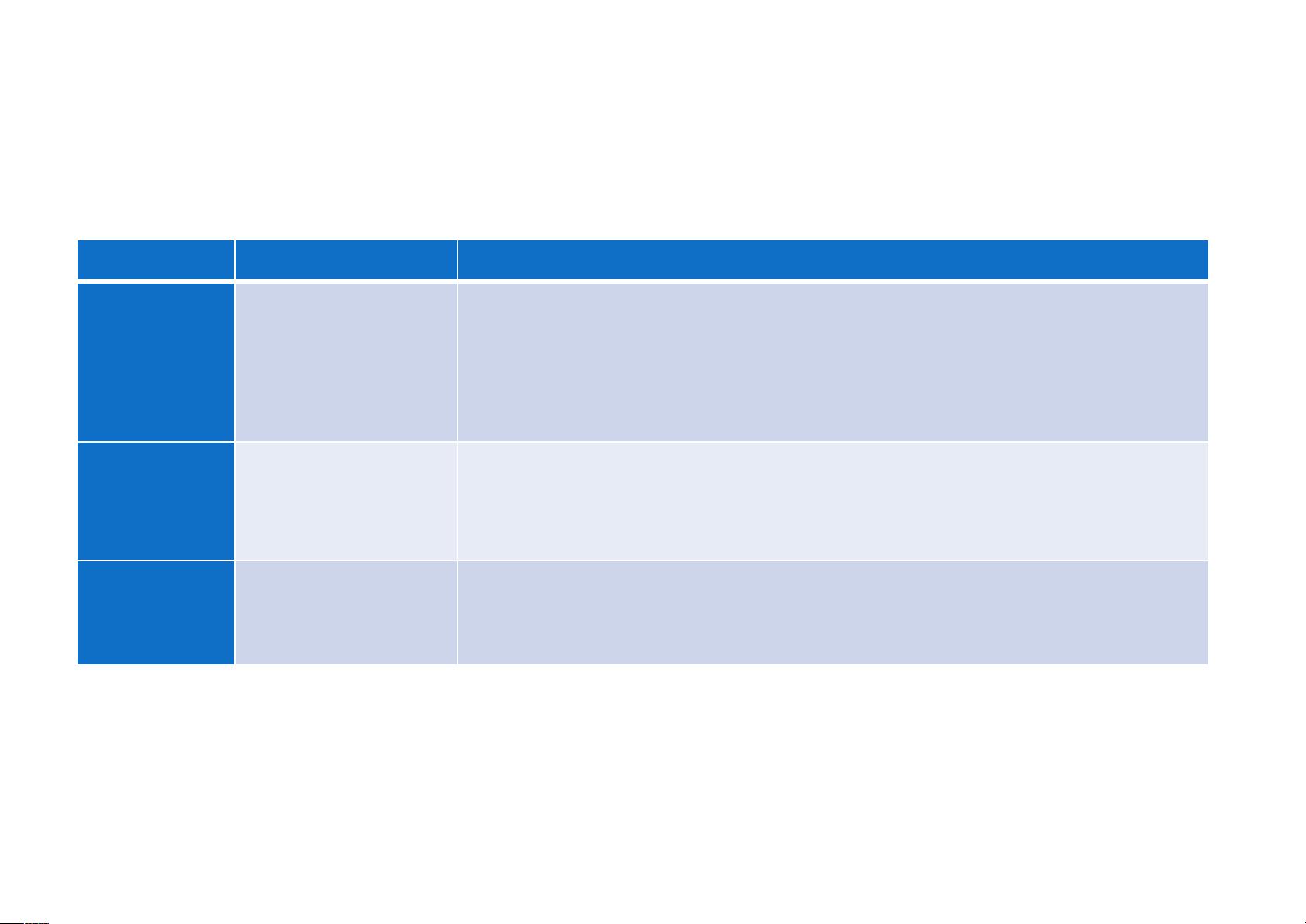
Layers Definition
Communication
Granularity
Remarks
Protocol
Message
The Protocol layer is the top
-most layer in the bus protocol architecture. The function of the
Protocol layer is to:
• Generate and process requests and responses at the protocol nodes.
• Define the permitted cache state transitions at the protocol nodes that include caches.
• Define the transaction flows for each request type.
• Manage the protocol level flow control.
Network
Packet
The function of the Network layer is to:
• Packetize the protocol message.
• Determine, and add to the packet, the source and target node IDs required to route the packet
over the interconnect to the required destination.
Link
Flit
(FLow control unIT)
The function of the Link layer is to:
• Provide flow control between network devices.
• Manage link channels to provide deadlock free switching across the network.
剩余21页未读,继续阅读
127 浏览量
824 浏览量
313 浏览量
165 浏览量
145 浏览量
148 浏览量
171 浏览量
301 浏览量
169 浏览量

jiangchao3392
- 粉丝: 850
- 资源: 51
 我的内容管理
展开
我的内容管理
展开







最新资源
- React性的
- Distributed-Blog-System:分布式博客系统实现
- CloseMe-crx插件
- 欧式建筑立面图纸
- 北理工自控(控制理论基础)实验报告
- yolov7升级版切图识别
- 作业-1 --- IT202:这是我的第一个网站
- hit-and-run:竞争性编程的便捷工具
- Pytorch-Vanilla-GAN:适用于MNIST,FashionMNIST和USPS数据集的Vanilla-GAN的Pytorch实现
- SNKit:iOS开发常用功能封装(Swift 5.0)
- 创意条形图-手机应用下载排行榜excel模板下载
- 项目36
- 通过混沌序列置乱水印.7z
- reactive-system-design
- getwdsdata.m:从 EPANET 输入文件中获取配水系统数据-matlab开发
- 100多套html模块+包含企业模板和后台模板(适合初级学习)
