EPSON机器人软件操作与编程指南
需积分: 15 177 浏览量
更新于2024-07-18
收藏 22.62MB PPT 举报
"EPSON 软件操作手册"
这篇EPSON软件操作手册详细介绍了如何操作和管理EPSON机器人手臂的控制器以及相关的编程知识。手册包括四大部分:控制器操作、机器人管理器操作、程序编写和视觉应用案例。
1. 控制器操作:
- 通过USB连接控制器:手册指导用户如何利用USB接口与控制器建立连接,强调了连接成功后的状态显示。
- 通过以太网连接控制器:提供了设置IP地址和新增以太网连接的步骤,以便于远程控制和网络通信。
- 从控制器读取程序和将程序下载:涵盖了程序的上传与下载过程,这对于调试和更新程序至关重要。
- 控制器参数备份及恢复:教导用户如何备份和恢复控制器参数,确保数据安全。
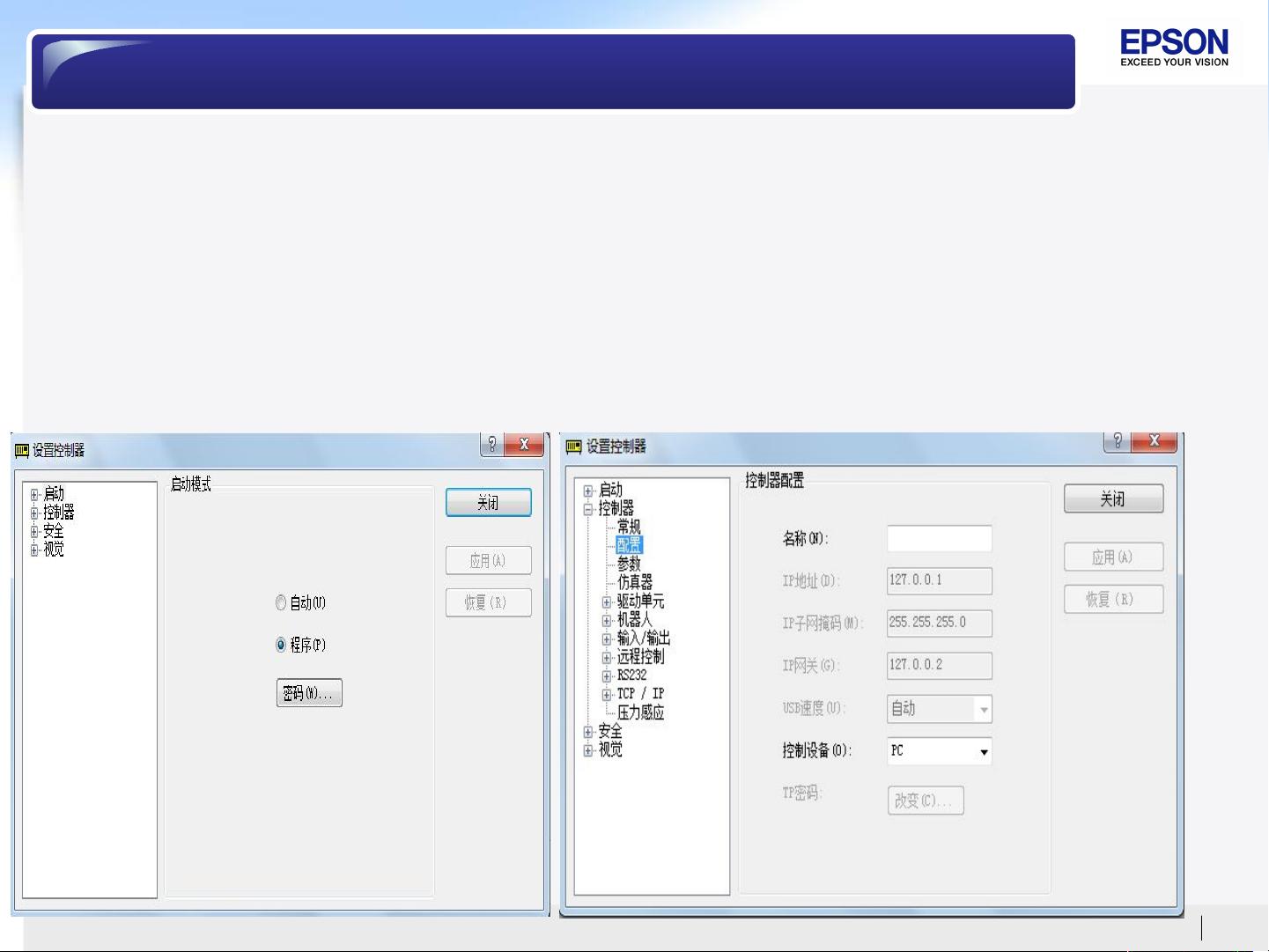
- 设置控制器参数:包括设置IP地址和I/O设置,以及远程控制模式的开启。
- 重置控制器:当遇到问题时,可以按照手册指示进行控制器的重置。
2. 机器人管理器操作:
- 伺服马达的打开、释放和重置:确保机器人手臂能够正常启动和停止。
- 点位示教和追踪:指导用户如何教授机器人执行特定点位的动作。
- 工具坐标示教和LOCAL坐标示教:让用户理解并设置不同坐标系对机器人运动的影响。
- XYZ极限设定和关节运动范围:设置机器人的运动边界,防止损坏或超出工作范围。
- Jump指令上升高度和下降高度设定:优化机器人的路径规划,避免碰撞。
3. 程序编写:
- 新建和打开项目:介绍项目管理的基本操作。
- 编译、下载和运行程序:涵盖完整的编程流程,从编写代码到实际运行。
- 单步运行程序:方便调试,观察每个步骤的效果。
- 变量定义:解释局部变量、模块变量和全局变量的区别和使用场景。
- 常用指令使用:如GO、JUMP、MOVE、ARC等,以及输入输出、循环控制、串口和以太网通讯的编程实例。
4. 视觉应用案例:
- EPSON机器人与其他品牌视觉系统的配合,包括固定向下相机、移动向下相机和固定向上相机的应用案例,展示了视觉系统在自动化中的重要作用。
这份手册不仅适合初学者了解EPSON机器人的基本操作,也对有经验的工程师在高级功能和集成应用上提供了详尽的指导。通过学习,用户可以全面掌握EPSON机器人系统的管理和编程技巧,从而更高效地利用这些先进的机器人技术。
11
1 、控制器操作
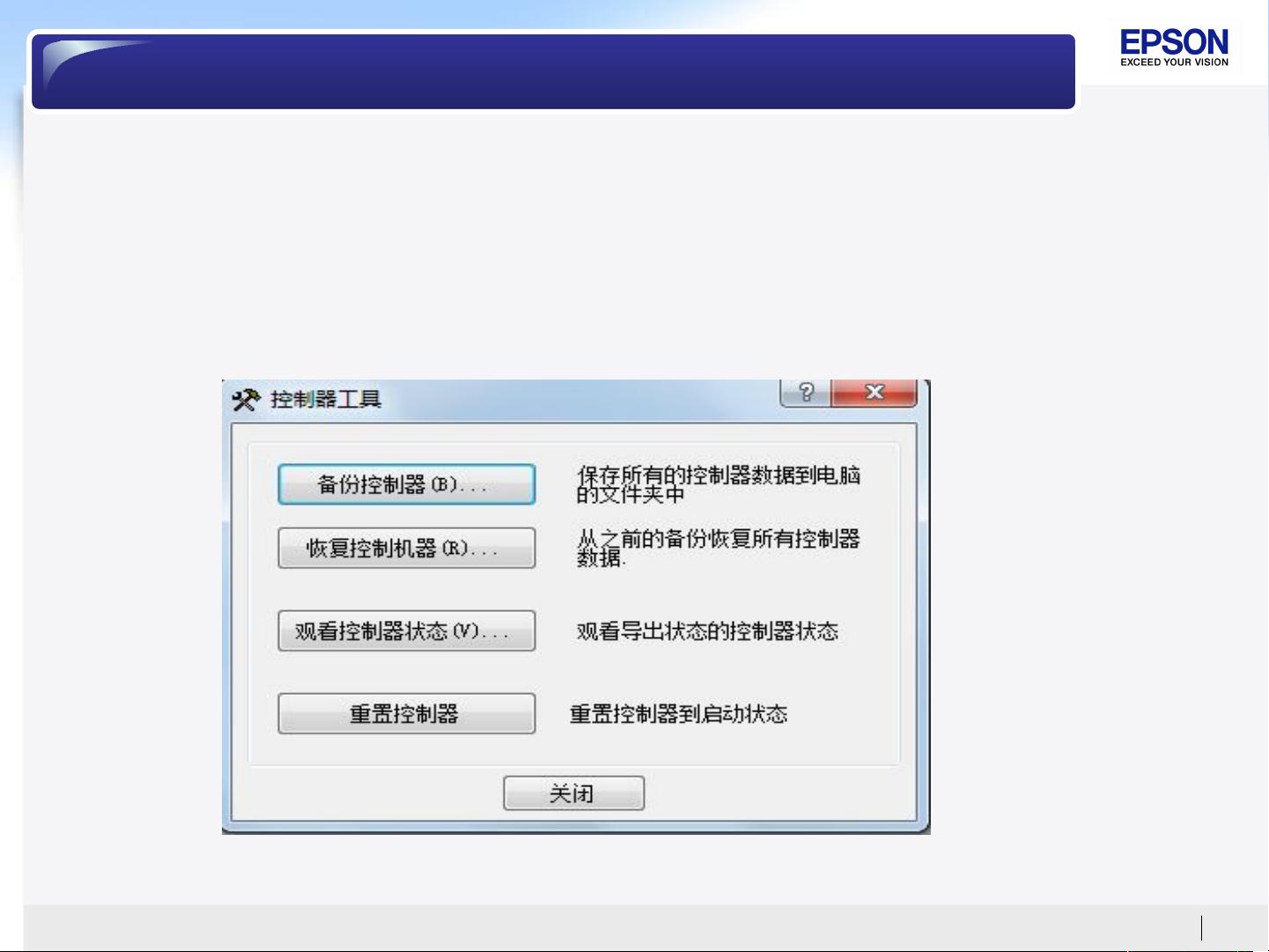
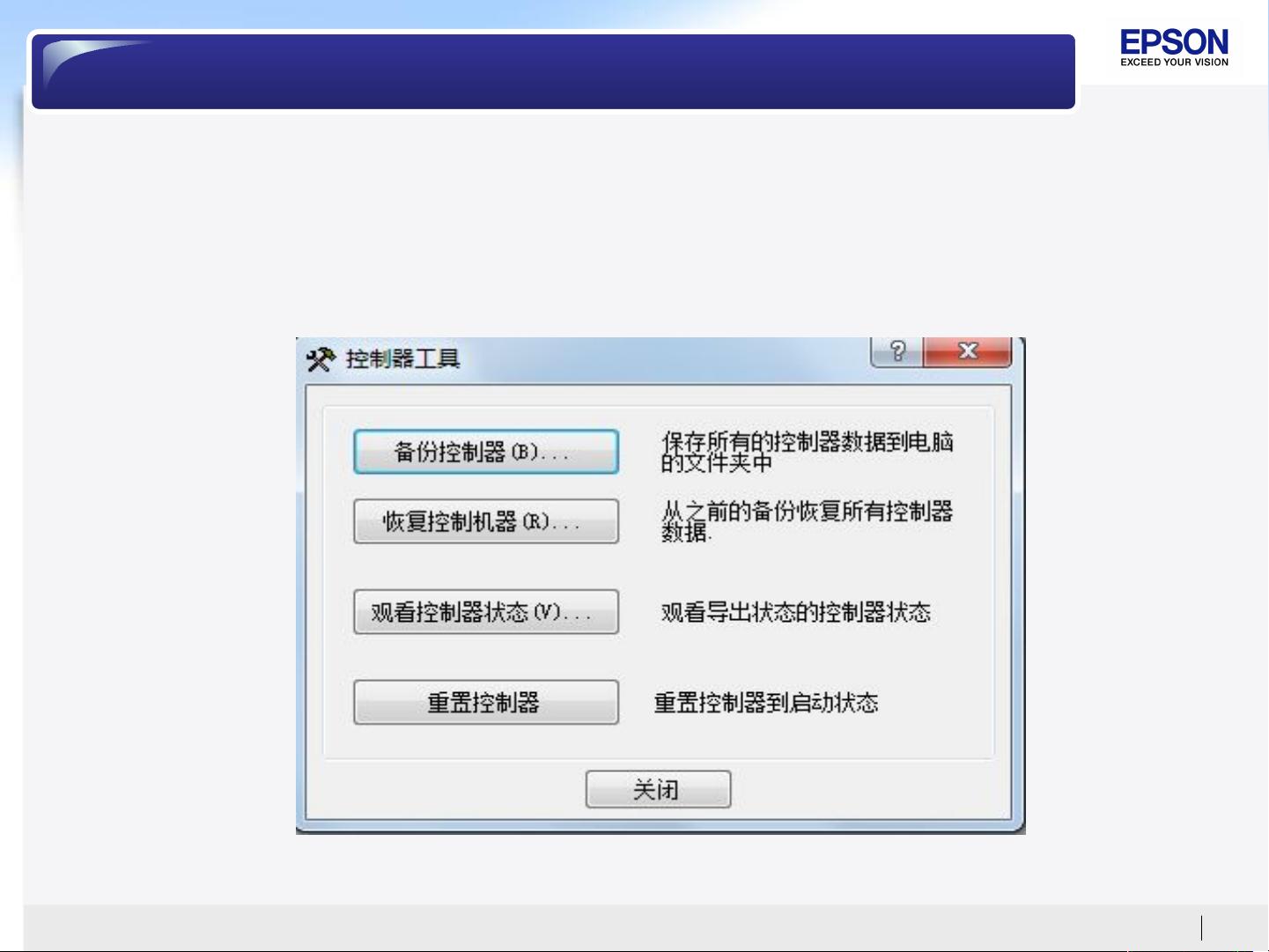
1.5 控制器参数备份及恢复
1 )控制器备份
单击“工具”,选择“控制器”进入下图画面,单击“备份控制器”,选择一个文
夹(如果不选择的话备份文件会存储到软件安装文件夹 EpsonRC70 下的 Backup 文
件
夹里面。),然后单击“确定”
剩余63页未读,继续阅读
2019-02-26 上传
2018-08-06 上传
2023-06-29 上传
2022-06-04 上传
2018-10-01 上传
2013-01-07 上传

weixin_43796184
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
