MWC飞控组装与调试指南
"MWC飞控组装调试说明详细介绍了如何组装多轴飞行器的MWC(MultiWii Control)飞控系统,并提供了电机、电调、接收机与飞控的连接方法,以及飞控固件的调试流程。"
MWC飞控组装及调试是无人机制作中的关键步骤,涉及到硬件连接和软件配置两大部分。以下是对这部分内容的详细说明:
1. **硬件连接**
- **电机与电调的连接**:根据飞控上的编号,电机与电调的连接需对应正确。例如,在四轴模式下,前电机连接D3,后电机连接D9,左电机连接D11,右电机连接D10。电机旋转方向至关重要,顺时针旋转的电机应连接反桨,逆时针旋转的电机则连接正桨。对于其他模式,如四轴X模式,电机的连接位置会有所变化,需要参照相应的模式图进行连接。
- **接收机与飞控的连接**:接收机的各个通道需与飞控板上的相应接口对应。通常,AIL对应副翼或横滚(1通道),ELE对应俯仰或升降(2通道),THR对应油门(3通道),RUDD对应航向或自旋(4通道)。AUX1可用于自定义飞控模式,如气压定高、自稳等。D8和D12可以配置为AUX2接口,同样用于扩展功能。
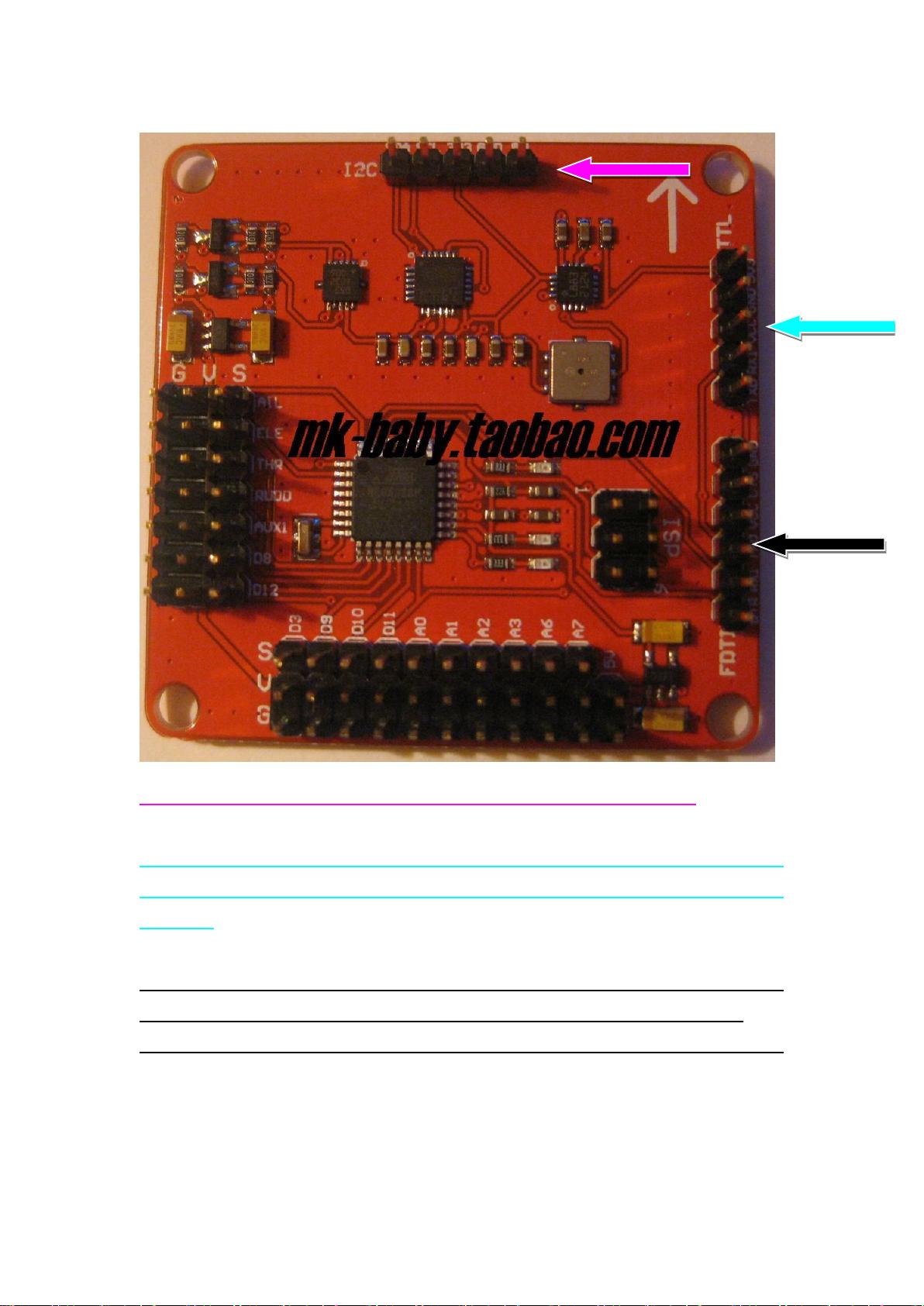
2. **USB转串口调试板的连接**
- **I2C预留接口**:提供3.3V及5V电源,但在此场景中未直接用于飞控。
- **TTL接口**:用于连接蓝牙模块,提供3.3V或5V电源。如果使用3.3V电源,不需要在TXD及RXD线上串联1K电阻。
- **FTDI接口**:这是固件升级和参数调整的关键接口,通过双头6P杜邦线与USB调试板相连。确保连接时遵循飞控板和调试板上的标识,避免反接。
3. **飞控固件调试**
- **固件升级**:通过FTDI接口和USB转MINIUSB线连接到电脑,利用专用软件对飞控固件进行升级,以获取最新的功能和优化性能。
- **参数调整**:固件升级后,用户可以根据飞行需求和无人机配置,调整飞控的各项参数,如PID控制器参数、传感器校准等,以确保飞行稳定性和控制精度。
在实际操作中,务必注意电机旋转方向的正确性,以及不同品牌设备的通道顺序可能存在的差异。此外,保持良好的电气连接和适当的硬件布局也是保证飞控系统正常工作的基础。在完成硬件组装后,进行软件配置和地面测试,以验证整个系统的功能和飞行性能。
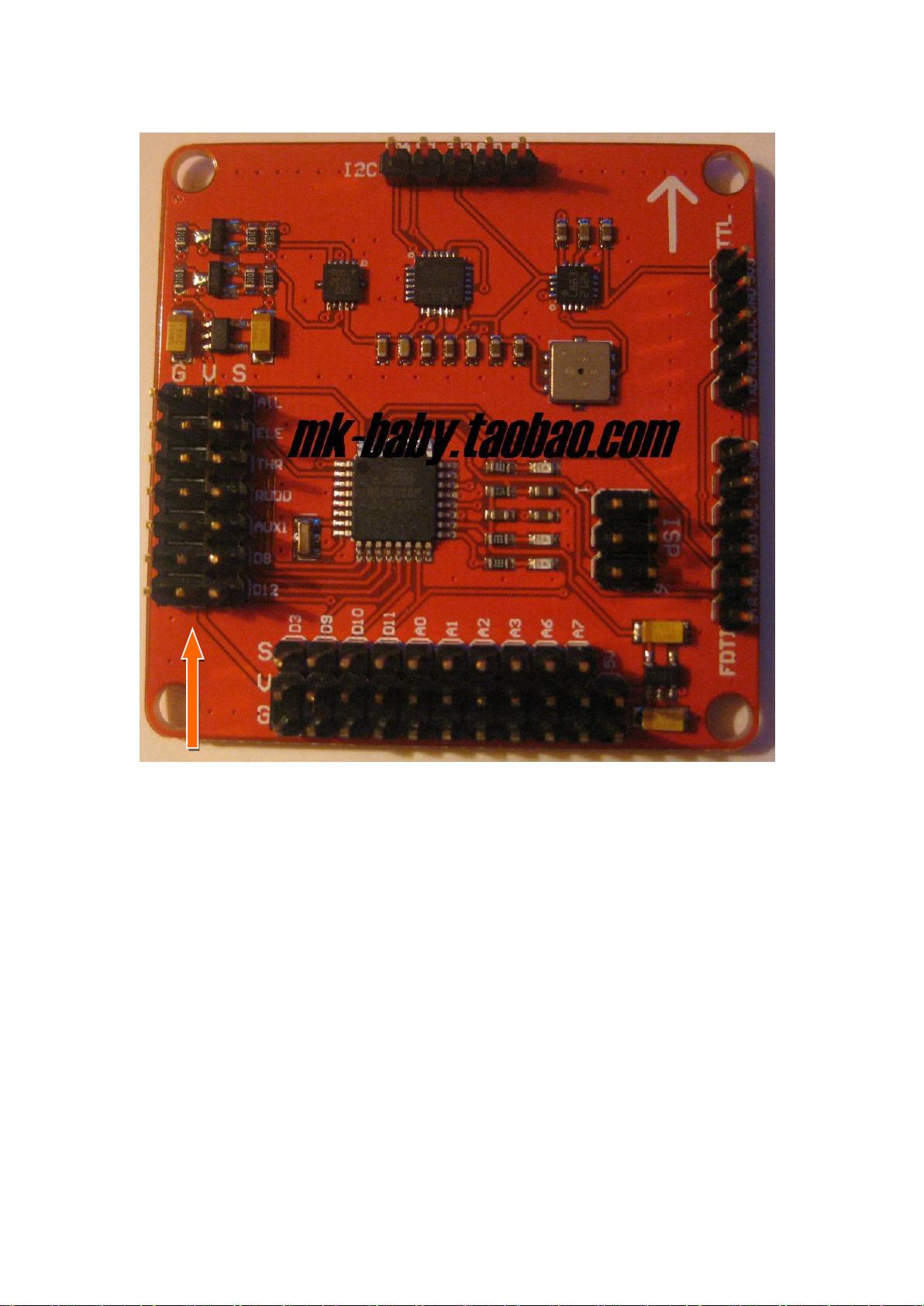
接收机通过双头 3P 杜邦线连接至飞控板上橙色箭头所指区域
AIL: 对应接收机上的副翼或者叫横滚(1 通道)
ELE:对应接收机上的俯仰或者叫升降(2 通道)
THR:对应接收机上的油门(3 通道)
RUDD: 对应接收机上的航向或者叫自旋(4 通道)
AUX1:对应接收机上的 5 通道(也可接遥控器上的空余通道),用于自定义飞控
的各种模式,如气压定高,自稳等等的开启和关闭。
D8、D12:通过修改飞控固件可任选其一作为 AUX2 接口用于自定义飞控的各
种模式,如气压定高,自稳等等的开启和关闭。
注:不同品牌的遥控器和接收机通道顺序可能会不一样,连接过程中请按接收机
的实际顺序连接。
剩余25页未读,继续阅读
175 浏览量
279 浏览量
184 浏览量
175 浏览量
491 浏览量
243 浏览量
180 浏览量

yujianyang1988
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- ACM赛事提醒与管理前端项目
- InterviewQuestionsPractice:破解编程面试第 5 版
- ample-star-wars
- structured-additive-IR
- windows中的vim文本编辑器
- django-blog-zinnia:简单但功能强大且真正可扩展的应用程序,用于在Django网站中管理博客
- EverestPook.Topomatic.gaZeMqF
- leezhengqi.github.io
- dirtydozen.dev:12种最常见的代码气味!
- jQuery thumbnail 惟美的图片Tip提示效果
- simple-scm-publish:一个 Maven 插件扩展,极大地简化了将文件夹内容发布到 GIT 或 SVN 存储库的任务
- 验证码:PHP验证码库
- 阅读笔记
- strezz:任何网站的压力测试
- AngularJs控制器中的依赖注入
- acconeer_stm32l476_module_software_v2_2_1_60ghzpcr_V2_pcr雷达的STM3
