四轴飞行器MWC飞控组装与调试指南
需积分: 10 48 浏览量
更新于2024-07-22
收藏 2.61MB PDF 举报
"MWC飞控组装调试说明,包括硬件连接、接收机与飞控的连接、USB转串口调试板的连接以及飞控固件的烧写步骤。"
MWC飞控组装调试是一项对初学者友好的技术工作,旨在帮助用户更轻松地进入无人机控制领域。以下是详细的组装调试步骤:
**一、硬件连接**
1. **电机旋转方向及电机与飞控连接**
- 电机的旋转方向至关重要,飞控上的红色箭头应始终指向四轴的正前方。电机与电调的连接遵循数字对应原则,例如在四轴十字模式下:
- 前电机(顺时针转)使用反桨连接到D3
- 后电机(顺时针转)使用反桨连接到D9
- 左电机(逆时针转)使用正桨连接到D11
- 右电机(逆时针转)使用正桨连接到D10
- 四轴X模式下的电机连接与十字模式略有不同,需根据具体模式调整。
2. **接收机与飞控连接**
- 接收机通过双头3P杜邦线接入飞控板,各通道对应如下:
- THR:油门(3通道)
- AIL:副翼或横滚(1通道)
- ELE:俯仰或升降(2通道)
- RUDD:航向或自旋(4通道)
- AUX1:5通道,用于自定义飞控模式,如气压定高、自稳等。
- 注意不同品牌遥控器和接收机的通道顺序可能不同,务必按照实际接收机的顺序连接。
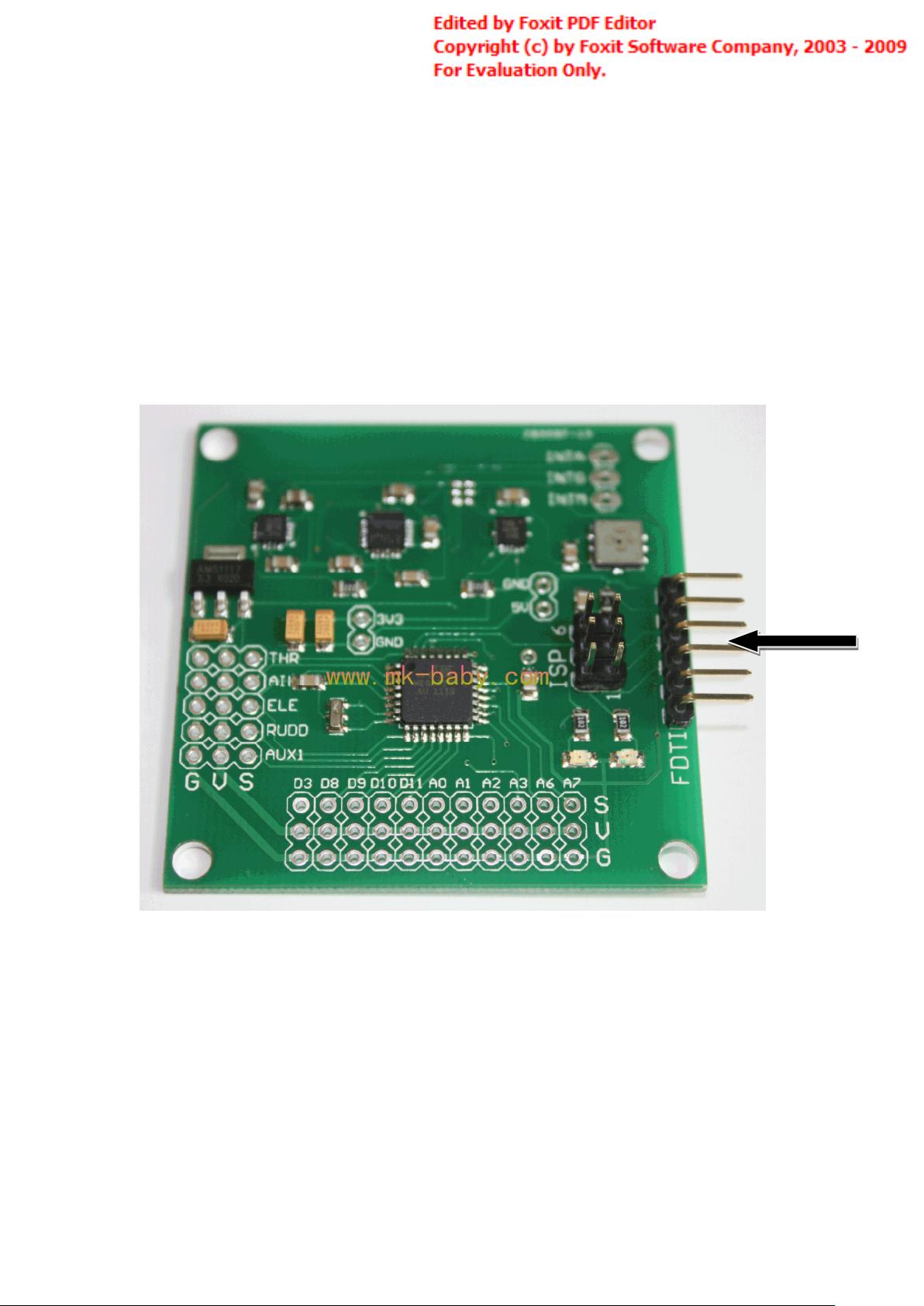
3. **USB转串口调试板与飞控连接**
- 使用双头6P杜邦线将飞控与调试板连接,确保标识无误,避免插反。
- 调试板通过USB转MINIUSB线连接至电脑。
**二、飞控固件的烧写**
1. **准备工作**
- 确保所有硬件已按章节一中的说明正确连接。
- 下载固件烧写软件,地址为:http://arduino.googlecode.com/files/arduino-0022.zip,该包内也包含USB调试板的驱动。
- 在插入USB调试板后,根据电脑提示安装驱动。
2. **固件烧写**
- 打开固件烧写软件,固件和调试软件可从Google Code(http://code.google)下载。
- 按照软件界面提示,选择正确的串口和波特率,然后进行固件的烧写更新。
在整个组装和调试过程中,务必仔细阅读每个步骤,遵循指导,同时保持谨慎,避免短路或其他可能导致设备损坏的操作。对于初学者来说,熟悉这些基础知识是成功操控MWC飞控的关键。通过不断的实践和学习,可以更好地理解和掌握无人机飞行控制系统的工作原理。
THR:对应接收机上的油门(3 通道)
AIL: 对应接收机上的副翼或者叫横滚(1 通道)
ELE:对应接收机上的俯仰或者叫升降(2 通道)
RUDD: 对应接收机上的航向或者叫自旋(4 通道)
AUX1:对应接收机上的 5 通道(也可接遥控器上的空余通道),用于自定义飞控
的各种模式,如气压定高,自稳等等的开启和关闭。
注:不同品牌的遥控器和接收机通道顺序可能会不一样,连接过程中请按接收机
的实际顺序连接。
3.USB 转串口调试板和飞控之间的连接:
飞控上黑色箭头和 USB 调试板黑色箭头之间用双头 6P 杜邦线连接
(注意飞控板反面及调试板正面的文字标识,不要插反了)
剩余22页未读,继续阅读
253 浏览量
396 浏览量
253 浏览量
129 浏览量
325 浏览量
405 浏览量
570 浏览量
1067 浏览量
174 浏览量

nice昱晨
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- kubernetes-kms:for适用于Kubernetes的Azure Key Vault KMS插件
- Data_Explore_py_pandas_Professional_nanodegree_program:具有一些基本描述性统计信息的用户交互式数据探索程序
- IntelligentAgentsAssignment:第一次尝试在非常简单的环境中实现信念-愿望-意图模型
- flash元件批量改名命令(jsfl)
- fullstackopen:赫尔辛基大学
- Calendar2.rar
- vscode-mono-debug:一个简单的VS Code调试适配器,用于单声道
- packtools:用于处理SciELO PS XML文件的Python库和命令行实用程序
- 使用 MATLAB 进行信用风险建模:这些是 MathWorks 网络研讨会的同名 MATLAB 支持文件。-matlab开发
- 采购管理工程招投标流程
- CBB-Stats
- 12.XGBoost_data.rar
- 电子功用-基于电压跟踪的锂电池剩余电量的计量方法
- 皇家型
- android:android相关代码和示例
- 采购与仓储管理
