KUKA系统软件KRC4.1版系统变量详解
需积分: 13 10 浏览量
更新于2024-07-17
收藏 966KB PDF 举报
“系统变量4.1版.pdf”是关于库卡(KUKA)机器人系统软件KRC中系统变量的详细指南。这份文档是2004年3月30日发布的版本02,由KUKA Roboter GmbH出版,包含了对软件KRC中系统变量的深入解释和使用方法。
文档内容可能涵盖了如何有效利用KUKA系统软件(KSS)中的系统变量进行编程和控制。系统变量在机器人自动化中扮演着重要角色,它们允许用户存储和访问机器人系统的状态信息,如位置、速度、时间戳等,从而实现更复杂的控制逻辑和程序定制。此文档可能为读者提供了以下内容:
1. **如何使用本文件**:这部分可能介绍了阅读和理解文档的方法,包括如何查找特定的系统变量信息,以及如何将这些信息应用到实际编程中。
2. **分类章节**:文档的章节A至N,可能按照不同的系统变量类别进行划分,例如配置设置、运动控制、错误处理、通信等。每个章节可能详细阐述了相关变量的功能、用法及注意事项。
3. **具体变量说明**:在各个章节中,可能会详细介绍每个系统变量的名称、数据类型、作用、默认值以及如何在KUKA机器人控制系统中进行操作。
4. **技术更改声明**:文档明确指出,尽管内容已经过审查,但硬件和软件之间可能存在不一致,且保留了在不影响系统功能的情况下进行技术更改的权利。这意味着用户需要定期更新文档,以获取最新的信息。
5. **法律与版权信息**:文档强调了复制或传播需获得出版者许可,并警告用户,文档中未提及的功能不作为供货或服务的标准,意味着用户不能据此提出要求。
6. **更新与修订**:表示文档中的数据和说明会定期检查并更新,新的修改将在后续版本中发布。这表明KUKA重视其软件的持续改进和用户支持。
"系统变量4.1版.pdf"是KUKA机器人操作员和程序员的重要参考资料,提供了全面的系统变量知识,帮助他们更好地理解和优化机器人的工作性能。这份文档详细地介绍了KRC软件中系统变量的使用,对于在实际操作中解决自动化问题、提高生产效率具有极大的价值。
系
统变量
16
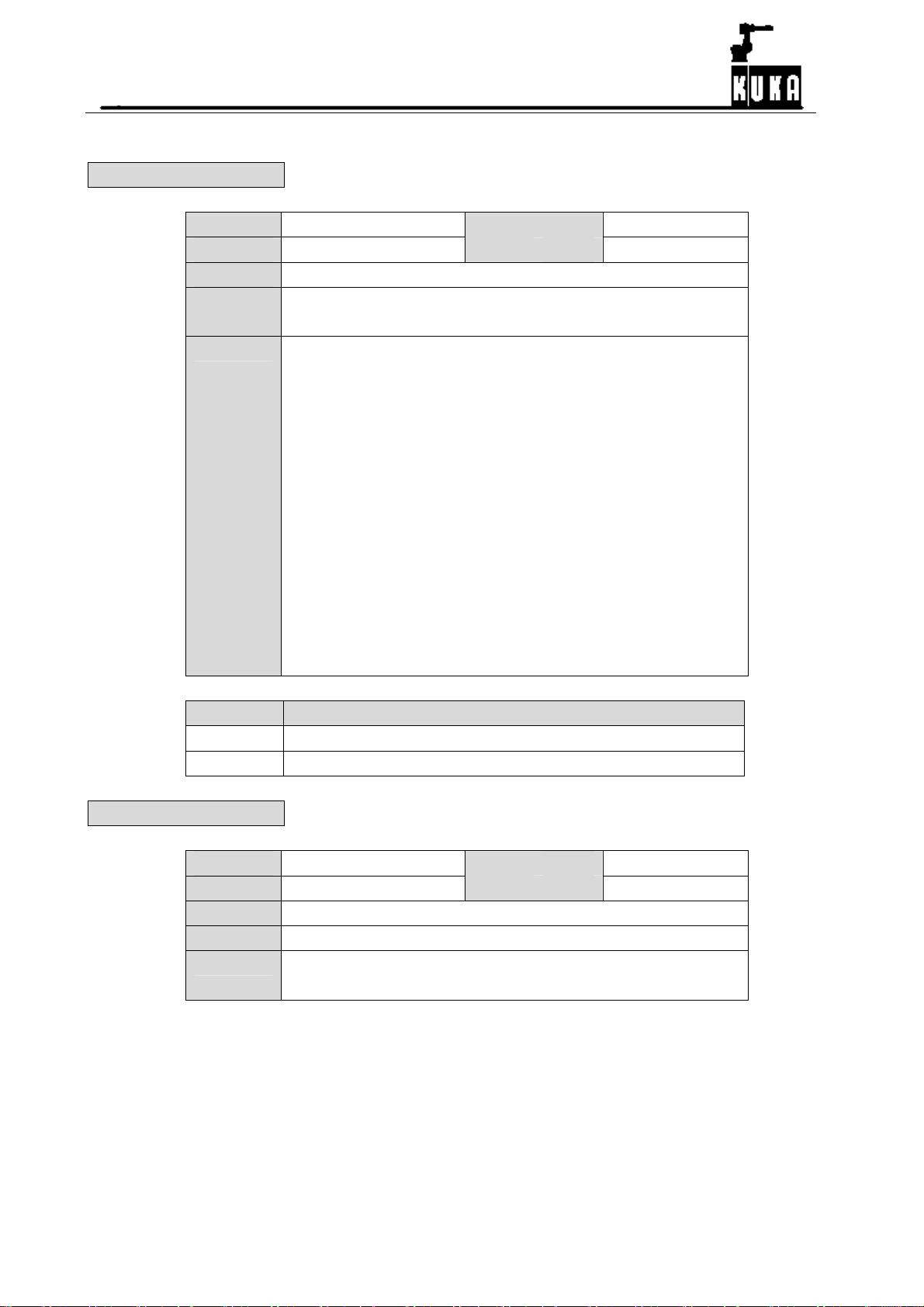
$ASYNC_AXIS
转换外部轴到异步模式的位排列
数据类型 整数 最小
单位
值
最大
所在文件
R1\Mada\$operate.dat
原始行
INT $ASYNC_AXIS
;Aktive asynchrone Zusatzachsen
注释
当$ASYNC_AXIS 被赋值进入一个 KRL 程序,这个最新定义的异步
轴从此刻位置开始有效,直到被赋值一个新的定义。
当$ASYNC_AXIS被定义时,如果$ASYNC_AXIS值变化了,那么在
$ASYNC_AXIS的新值存储好之前,提前运行将停止,系统将等待,
直到所有的同步运动(通过前进运动停止)和所有的异步运动执行
完,并且所有的轴都就位。因此这个指令“$ASYNC_AXIS=...”可以
和系统变量$ASYNC_STATE一起使用,协调同步和异步运动。
$ASYNC_AXIS可在KRL程序中修改,不在中断或SUBMIT解释程序
中。
位协调外部轴上升顺序:
位0=外部轴1,
位1=外部轴2,等等。
如果这个位设定了,这个外部轴将被转到异步模式,如果它要复位,
这个外部轴将被转回同步模式。
选项 效果
Bit = 1
相应轴转为异步模式
Bit = 0
相应轴转为同步模式
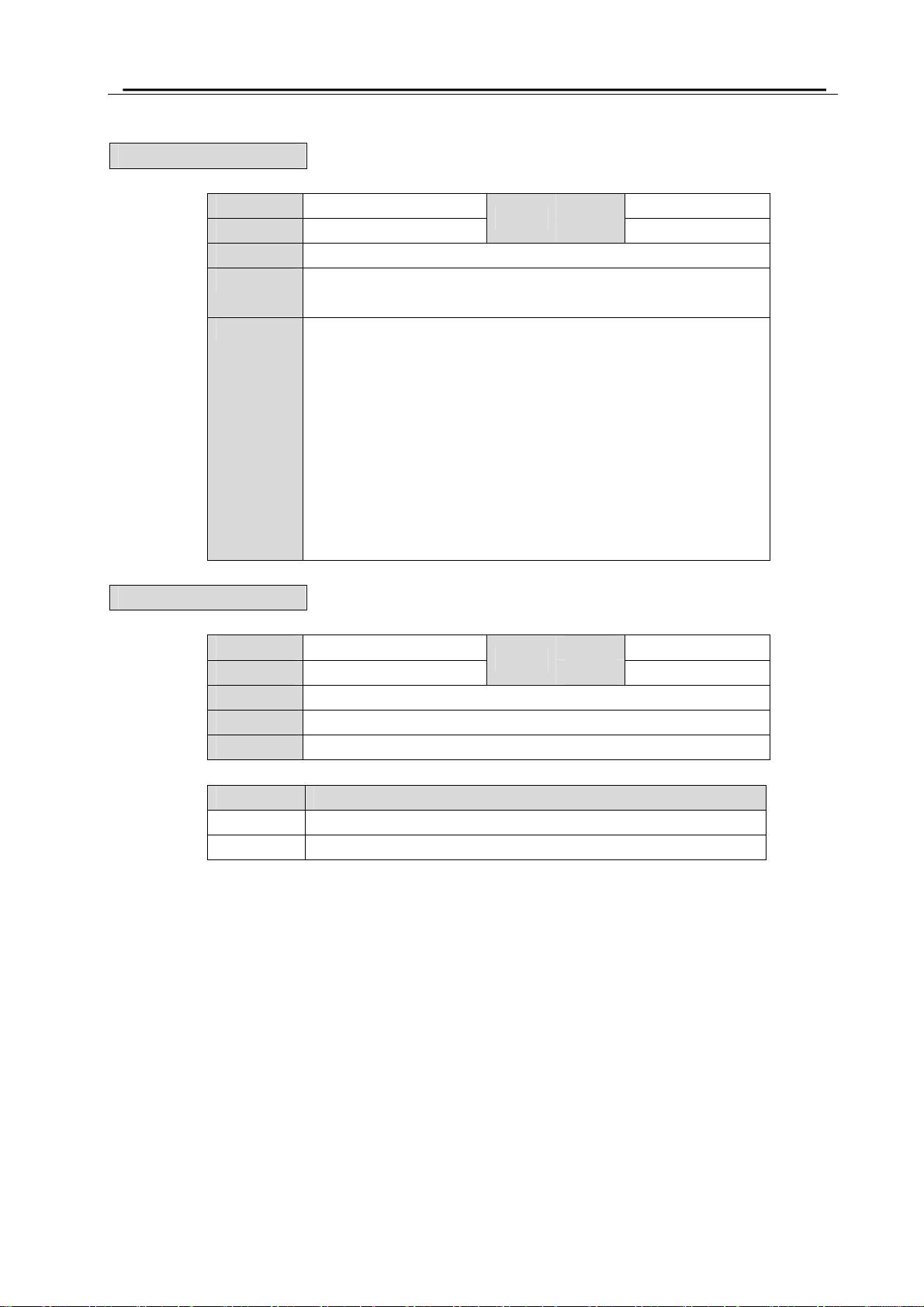
$ASYNC_FLT
异步的外部轴过滤器
数据类型 整数 最小 0
单位 ms
值
最大 16
所在文件
Steu\Mada\$operate.dat
原始行
INT $ASYNC_FLT
注释
$ASYNC_FLT 的值是对于所有异步坐标运动毫秒级的过滤器时间
长度,相当于同步运动的系统变量$FILTER。
剩余176页未读,继续阅读
2023-07-02 上传
2023-05-17 上传
2023-05-30 上传
2023-05-18 上传
2023-07-13 上传
2023-03-25 上传

ni_langwang
- 粉丝: 11
- 资源: 111
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
