Maxon EPOS4中文手册:轻松掌握位置控制技术
需积分: 49 116 浏览量
更新于2024-07-09
2
收藏 7.89MB PDF 举报
EPOS4中文使用手册是由瑞士maxon公司发布的一份详细的技术文档,专为工业自动化领域的专业技术人员设计。这是一份针对其新一代产品——EPOS4的位置控制器的控制手册,旨在帮助用户更好地理解和操作这款高度集成、智能化的控制器。
EPOS4作为EPOS系列的第四代产品,具有紧凑的尺寸和模块化设计,采用全数字架构,旨在提供简单易用的定位解决方案。它的核心特点是高功率密度,最大连续输出功率高达1050W,可以高效地控制Maxon的各种永磁电机,包括直流有刷、直流无刷电机,以及配备不同类型的编码器(增量式、绝对值或仅霍尔传感器)。
该手册详细介绍了EPOS4在CANopen和 EtherCAT通信网络中的从站角色,同时也支持USB和RS232接口,这意味着它能够在Windows和Linux操作系统中灵活应用,适应不同的工业自动化环境。EPOS4集成了先进的控制技术,如FOC(磁场定向控制)、加速度/速度前馈,以及双闭环控制,使其在处理复杂和高性能应用时表现出色。
手册涵盖了丰富的章节,如软件基础、通讯指南、参数设置、数字/模拟接口、运行模式选择、调试整定、错误代码处理和双环控制等内容,确保用户在操作过程中能够全面了解和解决问题。值得注意的是,EPOS4虽易于使用,但因其高科技特性及带电操作,非专业人士应避免随意操作和自行拆解,以防安全风险。
在使用EPOS4前,用户必须遵循手册中的安全提示,首先阅读“ReadMe”部分,确保理解所有注意事项和兼容性要求,特别是关于欧盟指令2006/42/EC对设备集成和安全标准的规定。如有任何疑问或故障,用户应直接联系Maxon的专业技术支持团队,以便获得及时的技术支持和售后服务。
EPOS4中文使用手册是一份全面的指南,对于想要充分利用这款高效位置控制器的工程师和技术人员来说,它是不可或缺的参考资料。

苏州钧和伺服科技有限公司
EPOS4
中文使用说明
MMCN
|
2020-03
|Version01
1-15
40 60 表示控制字(0x6040)的索引
06 00 表示控制器去使能
0F 00 表示控制器使能
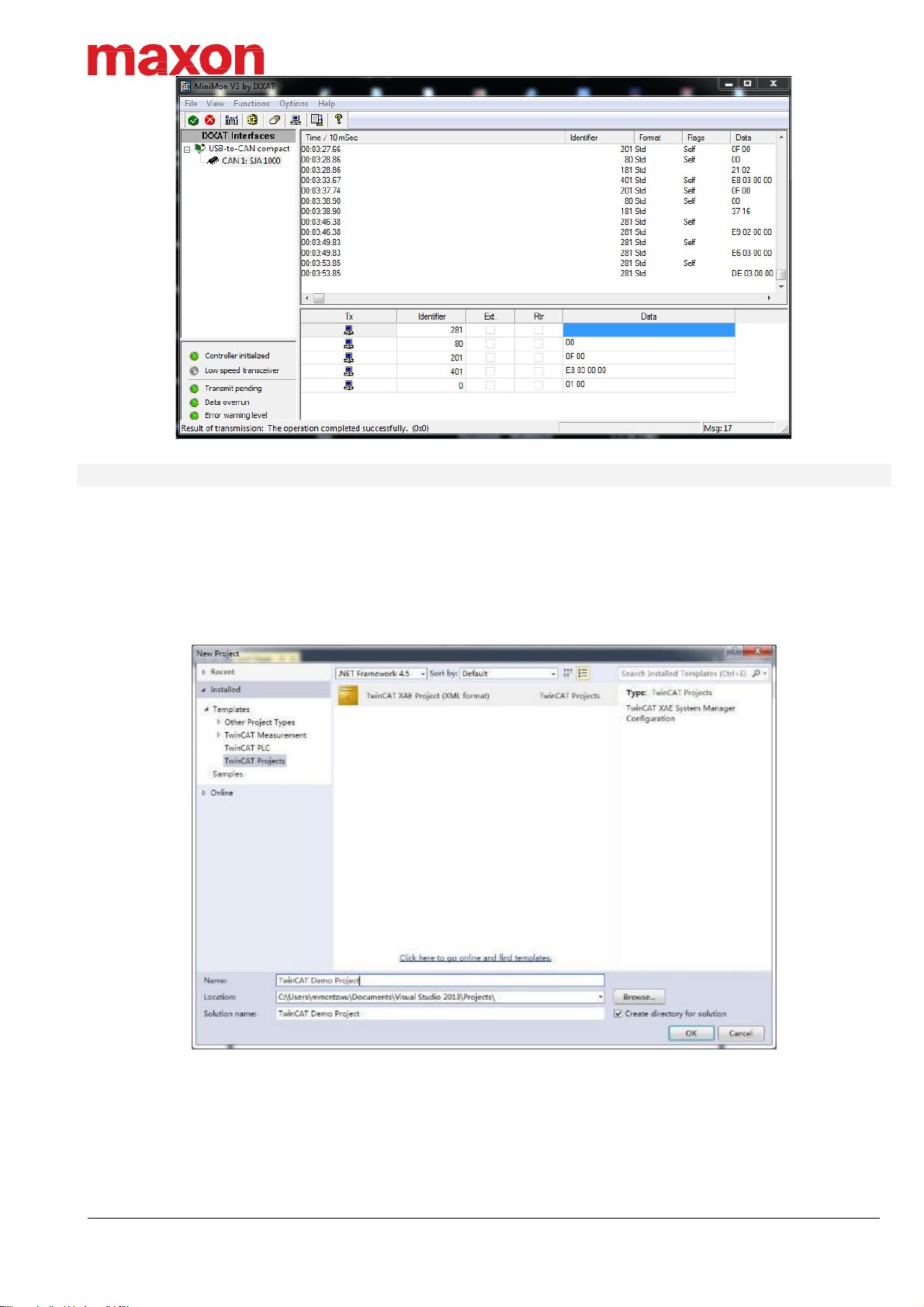
(4) 601 23 FF 60 00 E8 03 00 00
23 表示数据长度为 4 个字节
FF 60 表示设置目标转速
E8 03 00 00 表示转速为 1000rpm (0x3E8(十六进制)=1000(十进制))
(5) 601 2B 40 60 00 0F 00
参考(2)(3)的解释,参数设定完成后,电机开始运行
(6) 601 40 D3 30 01 (读取实际转速)
40 表示读对象
D3 30 表示对象为读取实际转速的索引
01 表示对象为读取实际转速的子索引
注:通讯对象的索引以及子索引查询可参考《EPOS4 Firmware Specification》
3. PDO
PDO 为过程数据,只需要发送,不需要接收,实时性高,传输速度快。与 SDO 区别在于通过 PDO 可以将 COB-ID 映射到某个
索引和子索引的数据对象。因此只要设置 COB-ID(xxx+Node-ID),即可发送数据到该节点所对应的对象。PDO 操作如下
(1) 打开 EPOS Studio 软件,通讯成功后,依次点击 Wizard>>CANopen,如下图:
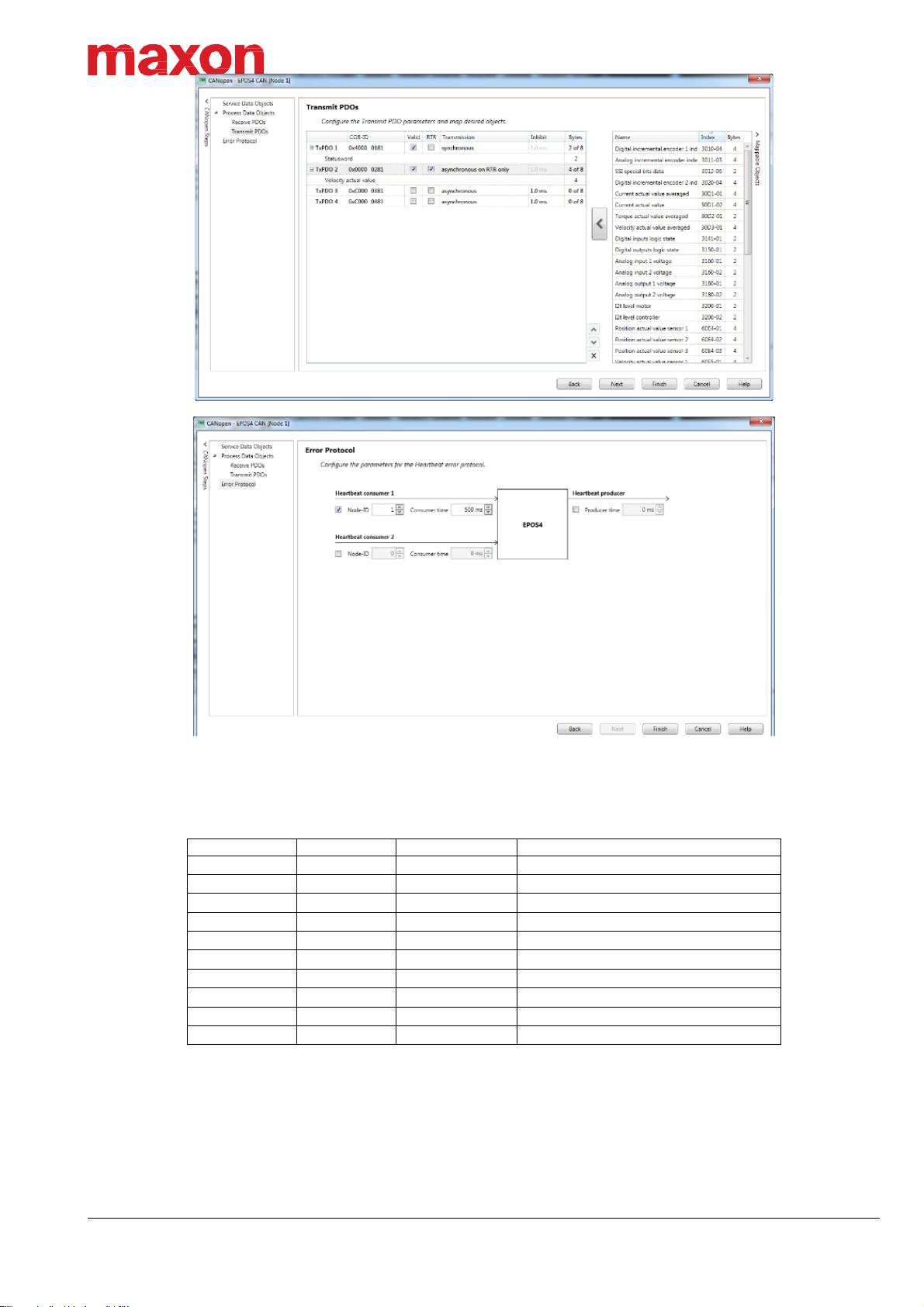
(2) 分别点击 Recieve PDOs 和 Transmit PDOs,配置相应的 RxPDO 和 TxPDO 映射。示例如下图所示,
RxPDO1(8 个字节)映射对象为控制字,占两个字节,COB-ID 为 201,触发方式为同步触发;
RxPDO2(8 个字节)映射对象为操作模式,占一个字节,COB-ID 为 301,触发方式为异步触发;
RxPDO3(8 个字节)映射对象为电机目标转速,占四个字节,COB-ID 为 401,触发方式为异步触发;
TxPDO1(8 个字节)映射对象为状态字,占两个字节,COB-ID 为 181,触发方式为同步触发;
TxPDO2(8 个字节)映射对象为电机实际转速,占四个字节,COB-ID 为 281,触发方式为异步远程帧触发。
剩余87页未读,继续阅读
2021-12-01 上传
2023-03-16 上传
2023-07-13 上传
2024-04-20 上传
2022-10-28 上传
2019-08-01 上传
2019-09-13 上传

Broglie_J
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
