
Remote Sens. 2016, 8, 501 5 of 22
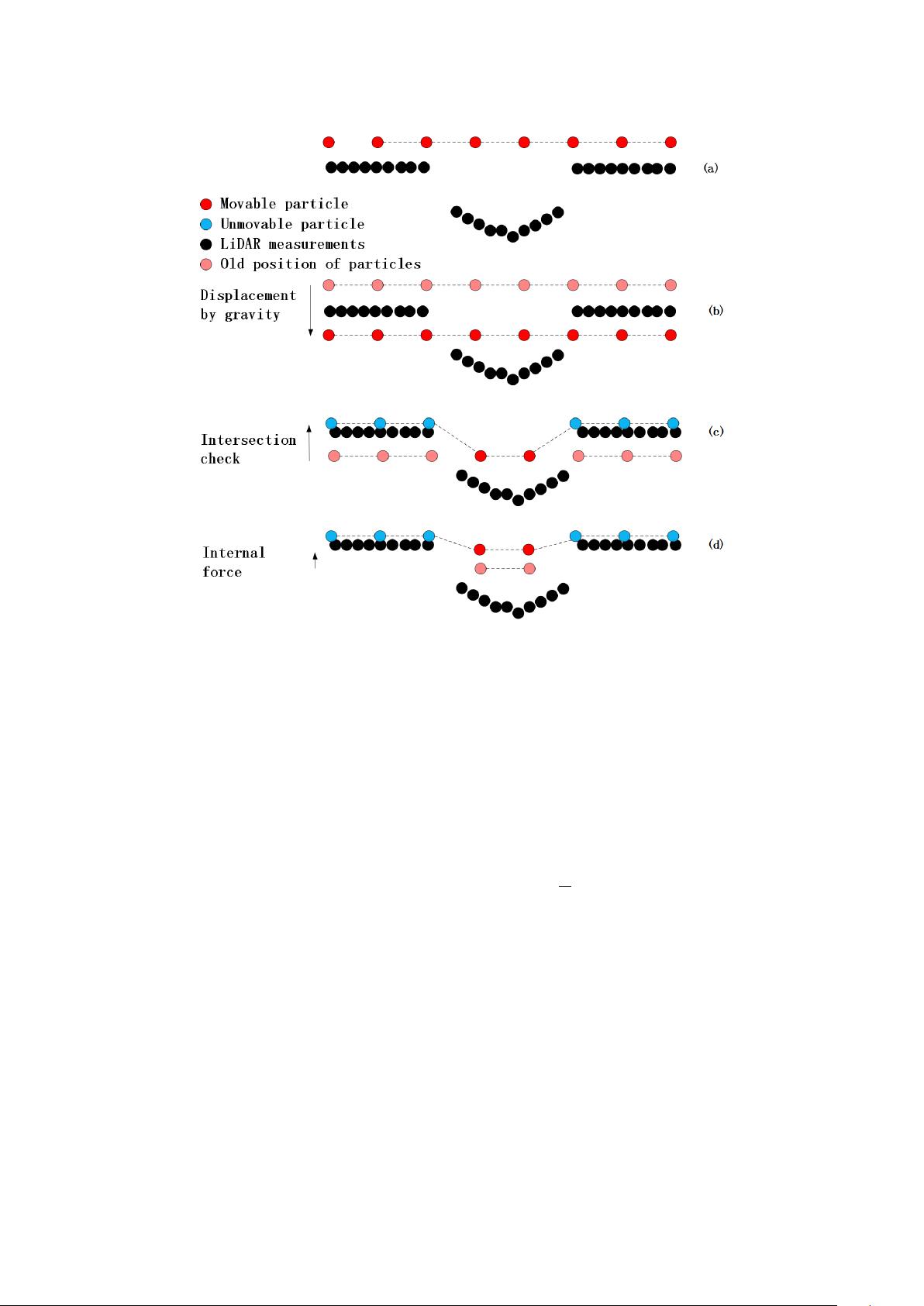
Figure 3. Main Steps in CSF: (a) Initial state. A cloth is place above the inverted LiDAR measurements;
(b) The displacement of each particle is calculated under the influence of gravity. Thus, some particles
may appear under the ground measurements; (c) Intersection check. For those who are under
the ground, they are moved on the ground and set as unmovable; (d) Considering internal forces.
The movable particles are moved according to forces produced by neighbour particles.
2.3. Implementation of CSF
As described above, the forces that act on a particle are considered as two discrete steps.
This modification was inspired by [28]. First, we calculate the displacement of each particle only
from gravity, i.e., solve Equation (1) with internal forces equal to zero. Then, the explicit integration
form of this equation is
X(t + ∆t) = 2X(t) − X(t − ∆t) +
G
m
∆t
2
(2)
where m is the mass of the particle (usually, m is set to 1) and ∆t is the time step. This equation is
very simple to solve. Given the time step and initial position, the current position can be calculated
directly because G is a constant.
To constrain the displacement of particles in the void areas of the inverted surface, we consider
the internal forces at the second step after the particles have been moved by gravity. Because of
internal forces, particles will try to stay in the grid and return to the initial position. Instead of
considering neighbors of each particle one by one, we simply traverse all the springs. For each
spring, we compare the height difference between the two particles which form this spring. Thus, the
2-dimensional (2-D) problem are abstracted as a one-dimensional (1-D) problem, which is illustrated
in Figure 4.
剩余21页未读,继续阅读

氧艺
- 粉丝: 258
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Hadoop生态系统与MapReduce详解
- MDS系列三相整流桥模块技术规格与特性
- MFC编程:指针与句柄获取全面解析
- LM06:多模4G高速数据模块,支持GSM至TD-LTE
- 使用Gradle与Nexus构建私有仓库
- JAVA编程规范指南:命名规则与文件样式
- EMC VNX5500 存储系统日常维护指南
- 大数据驱动的互联网用户体验深度管理策略
- 改进型Booth算法:32位浮点阵列乘法器的高速设计与算法比较
- H3CNE网络认证重点知识整理
- Linux环境下MongoDB的详细安装教程
- 压缩文法的等价变换与多余规则删除
- BRMS入门指南:JBOSS安装与基础操作详解
- Win7环境下Android开发环境配置全攻略
- SHT10 C语言程序与LCD1602显示实例及精度校准
- 反垃圾邮件技术:现状与前景
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


