双足机器人:硬件与软件设计探索
版权申诉
127 浏览量
更新于2024-06-23
收藏 1.1MB DOC 举报
本文档探讨了一种创新的会追光的双足机器人的设计,结合了先进的机器人技术和多传感器系统。以下是文档的主要内容概要:
1. **机器人技术概述**:
- 机器人是一种高度集成的技术产物,它集成了控制论、机械电子、计算机科学、材料科学和仿生学等多个领域的知识。
- 机器人的主要目标是辅助或替代人类执行重复性或危险的工作,在工业、医疗、农业和军事等领域都有广泛应用。
- 机器人通常由执行机构、驱动装置、检测装置和控制系统构成,执行机构包括关节,如直角坐标、圆柱坐标等,以实现各种运动形式。
2. **硬件设计**:
- 结构设计:着重于双足机器人的具体构造,可能涉及到腿部设计、关节连接和稳定性。
- 驱动器方案:可能是电动或液压驱动,确保机器人能够灵活移动。
- 传感器方案:
- 接近传感器:检测周围物体的距离,用于避障和导航。
- 超声测距传感器:用于精确测量距离,增强机器人的定位能力。
- 声音传感器:可能用于听觉识别或环境感知。
- 倾覆传感器:保持机器人平衡,防止意外翻倒。
- 光强传感器:跟踪光源,引导机器人进行追踪行为。
3. **软件设计**:
- 步态设计:涉及机器人的行走和站立控制算法,确保稳定的动态行为。
- 控制策略:可能包括路径规划、避障算法以及基于机器学习的智能决策系统。
4. **设计总结**:
- 整体设计旨在创造一个能够自主跟踪光源的双足机器人,结合硬件和软件优化,提高其在特定任务中的表现。
- 通过闭环控制和外部传感器的集成,提升机器人的环境适应性和智能水平。
文档的作者可能正在探讨如何将这种追光特性应用于导航、搜索或特殊环境下的任务,如夜间探索或光照变化的环境中。通过深入研究和实践,这种设计将推动机器人技术向更高级别的自主性和智能化迈进。
机器人之所以有“人”字,是因为人们希望这种新的人造物能够像人一样,
有聪慧的大脑、敏感的知觉、灵活的活动能力,能够代替人完成人们所不期望亲
力亲为的事情。机器人常用的运动驱动部件有直流有刷电机、直流无刷电机、步
进电机、舵机等。
“创意之星”配置了直流有刷电机、微型舵机、机器人专用舵机等。
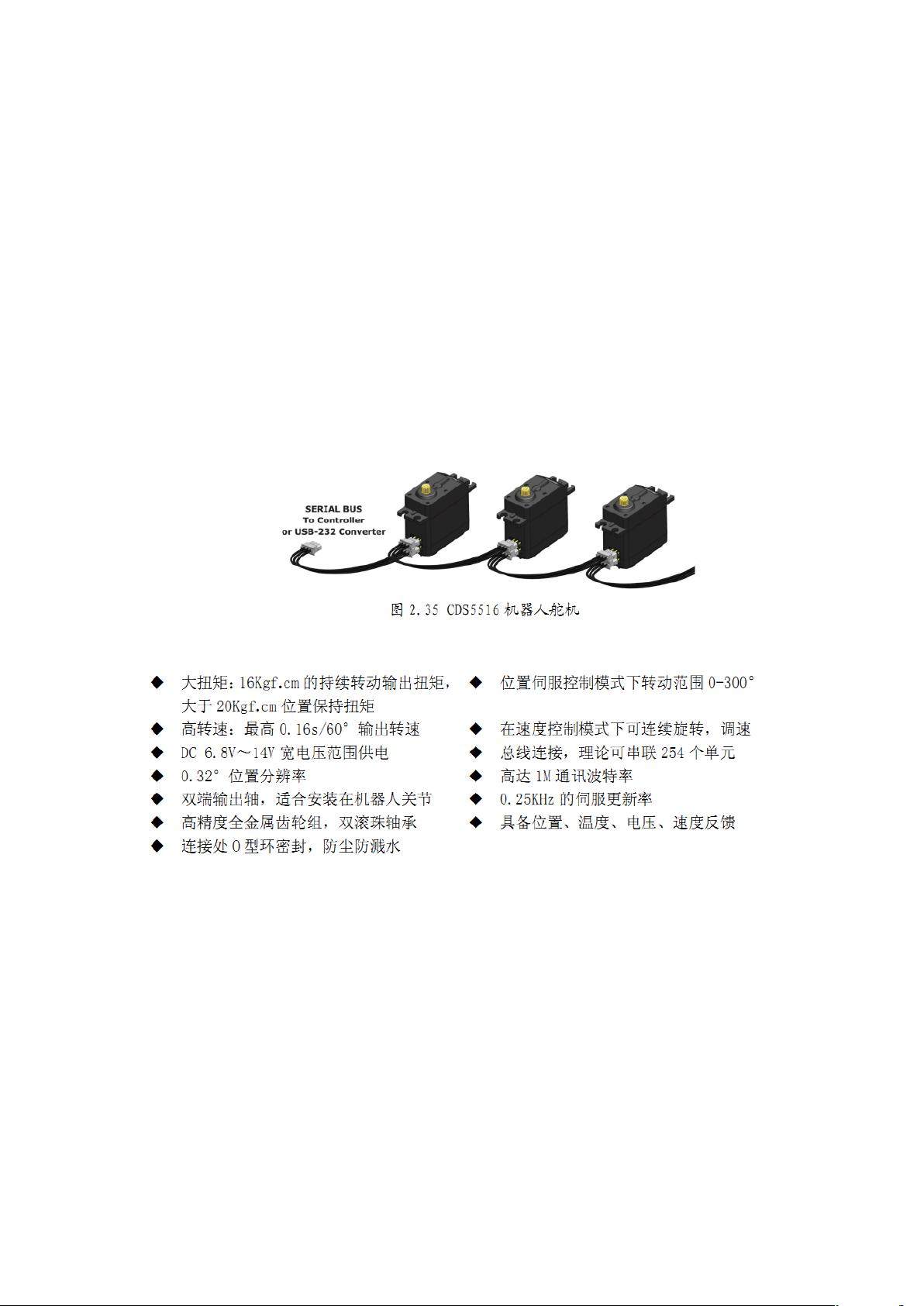
此课程设计采用的是 CDS5516 机器人舵机: proMOTION CDS 系列机器人舵
机属于一种集电机、伺服驱动、总线式通讯接口为一体的集成驱动单元,主要用
于微型机器人的关节、轮子、履带驱动,也可用于其他简单位置控制系统。
CDS5516 的特点如下图所示
CDS5516 的使用:
CDS5516 采用半双工串行异步总线进行控制,每个舵机都有自己单独的 ID
号,您在机器人构型搭建时需要对 ID 号进行配置,以免机器人的某些关节的 ID
号重叠。博创出厂的 CDS5516 默认 ID 为 1,在“创意之星”包装盒里有 CDS5516
ID 编号的不干胶,您设好 ID 后请将不干胶粘贴到舵机后盖上,避免遗忘。
CDS5516 有专用的调试环境 RobotServo Terminal,在这个环境下,您可以设置
舵机 ID、波特率、工作模式、速度限制、角度限制、电压限制等等。光盘 “……
\InnSTAR 产品光盘\部件资料汇总\CDS5516 机器人舵机”里有 RobotServo
剩余20页未读,继续阅读
点击了解资源详情
2023-07-11 上传
2023-07-12 上传
2023-06-24 上传
2022-11-27 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
