
B 两颗卫星在第[Math Processing Error]i([Math Processing Error]i=1,2)时刻的位置
矢量,[Math Processing Error]TDOA(ti)表示第[Math Processing Error]i 时刻的时
差。
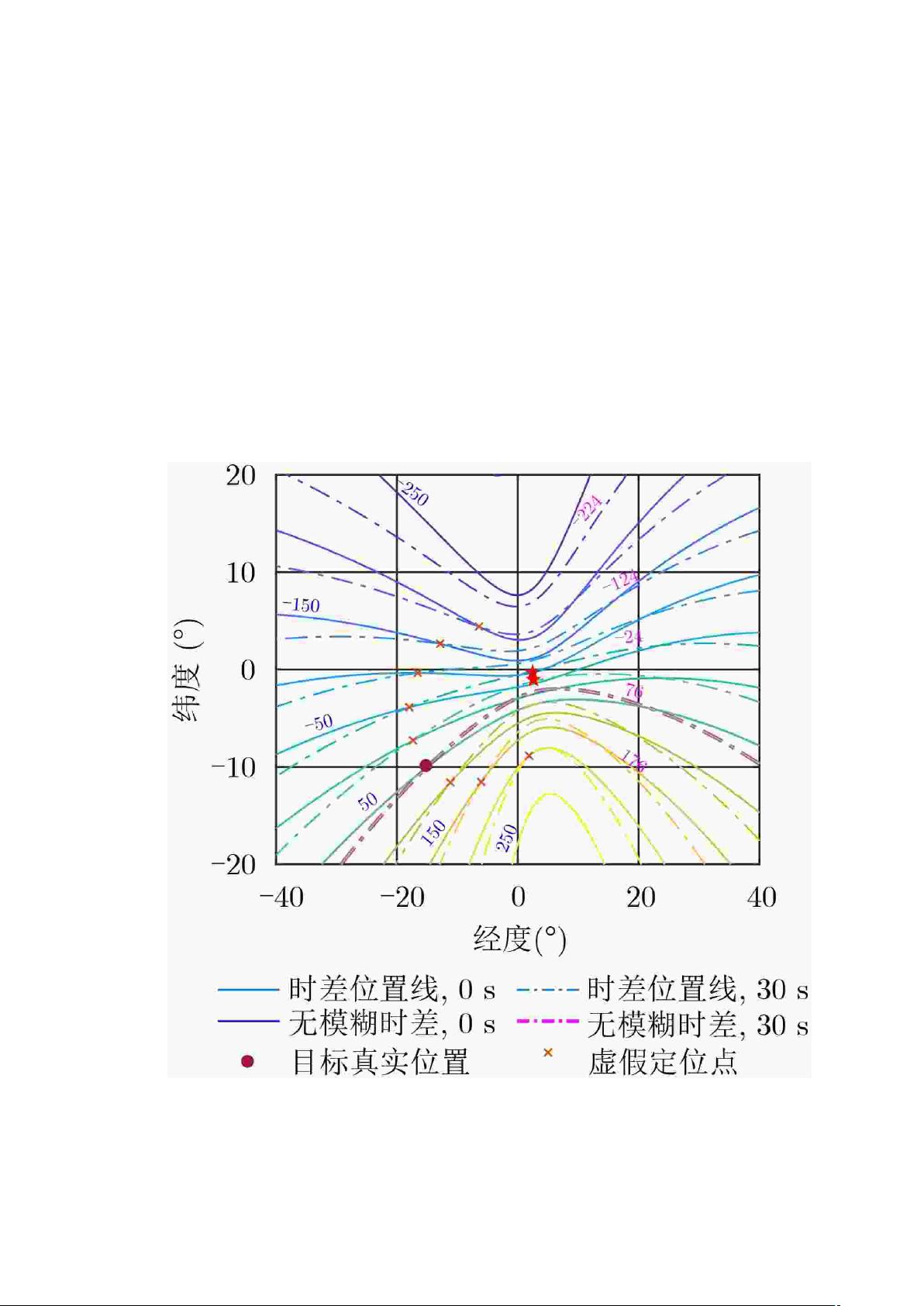
图 2 给出了图 1 中 0 s 与 30 s 时所有模糊时差值与地球表面相交的时差位置
线(Line Of Position, LOP)。从图 2 可以看出,利用两个时刻的所有模糊时差值进行
分时时差定位,除了两个时刻的无模糊时差位置线相交于目标真实位置处以外,所
有的模糊时差位置线之间也会相交产生虚假的定位结果,如图 2 中的“×”形相交
点。实际工程应用中,低轨双星系统一般通过左右接收通道区分基线两侧的目标,
因此图 2 中只绘制了左侧区域的所有位置线交点。
图 2 分时时差定位模糊示意图
下载: 全尺寸图片 幻灯片
剩余15页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4137
- 资源: 1万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







