3D-LaneNet:单图像3D多车道检测
需积分: 33 88 浏览量
更新于2024-09-03
收藏 8.8MB PDF 举报
"3D-LaneNet- End-to-End 3D Multiple Lane Detection.pdf"
本文介绍了一种名为3D-LaneNet的网络架构,该架构能够直接从单个图像中预测道路场景中的3D车道布局。这是首次尝试在不假设固定车道宽度或依赖预映射环境的情况下,仅通过车载感应器解决此任务。3D-LaneNet引入了两个创新概念:网络内的逆透视映射(IPM)和基于锚点的车道表示。
网络内的IPM投影使得信息流能够在常规图像视图和顶视图之间实现双表示,这样可以充分利用两种视角的优势。基于锚点的列输出表示允许端到端的方法,取代了传统的启发式方法,如聚类和异常值剔除,将车道估计问题转化为对象检测问题。此外,该方法还显式处理复杂的场景,如车道合并和分离。
论文展示了在两个新的3D车道数据集上的结果,一个合成数据集和一个真实数据集。为了与现有方法进行比较,他们在只有图像的tuSimple车道检测基准上测试了3D-LaneNet,性能与最先进的方法相当。
3D-LaneNet的核心创新在于其设计思路。首先,逆透视映射(IPM)的引入,这一技术能够将2D图像转换为更接近实际3D空间的视图,使得网络能更好地理解车道的空间结构。其次,基于锚点的车道表示方式,借鉴了目标检测中的锚框思想,为每个车道柱设定一组预先定义的参考点,使得网络可以直接预测车道的位置和形状,简化了车道检测的复杂性。
此外,3D-LaneNet对复杂道路情况的处理能力也是一个显著特点。在现实世界中,车道可能会合并、分离或者有其他复杂情况,3D-LaneNet能够识别并处理这些情况,增强了模型的鲁棒性和实用性。这在自动驾驶和其他道路安全应用中至关重要。
通过在两个新的3D车道数据集上的实验,3D-LaneNet展示了其在处理3D车道检测方面的有效性和准确性。并且,在图像-only的tuSimple基准测试中,它的表现与当前最先进的方法相当,进一步证明了其在实际应用中的潜力。
3D-LaneNet是计算机视觉领域的一个重要进展,尤其是在自动驾驶和智能交通系统中,它提供了一种新的、高效的3D车道检测方法,有望推动车辆感知和道路理解技术的进步。
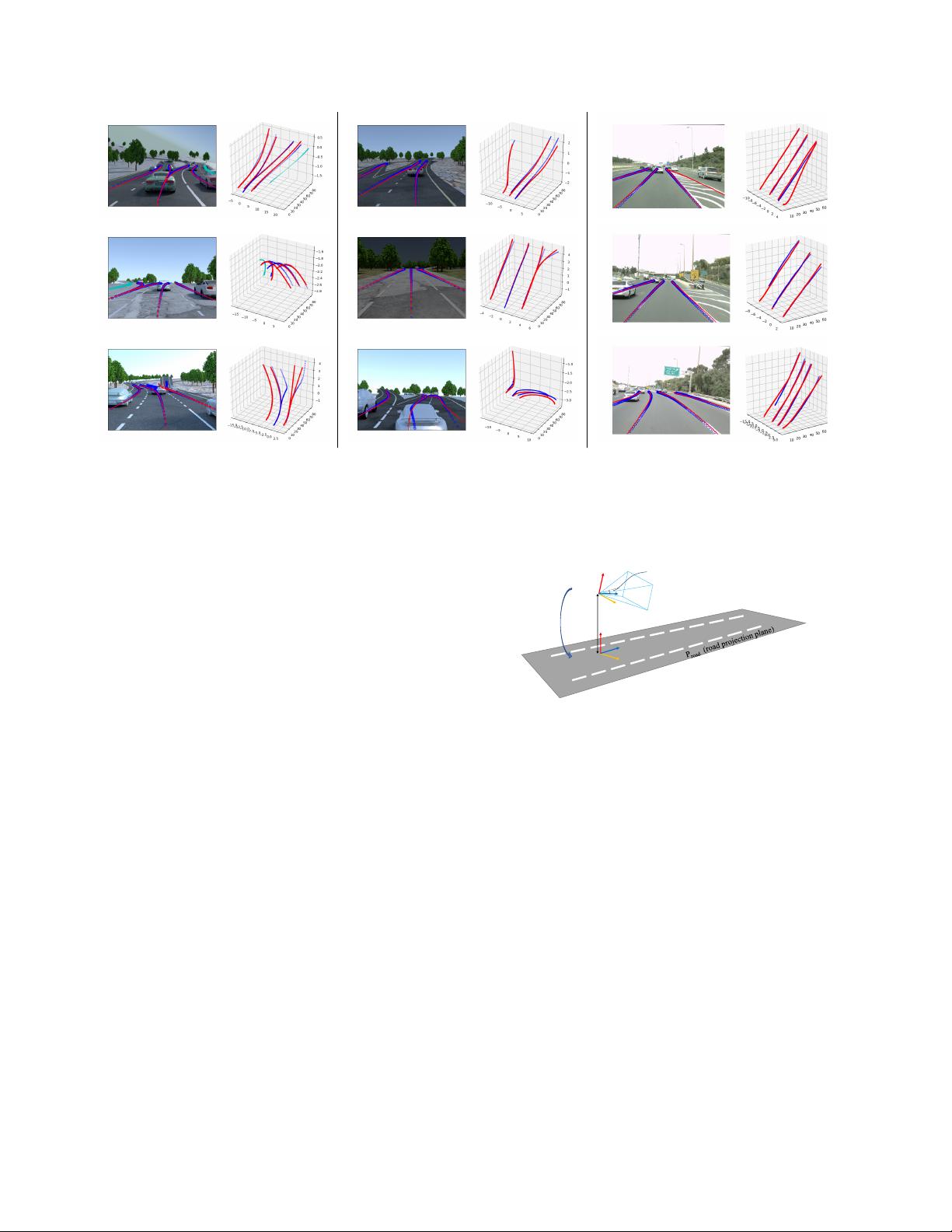
Figure 2. Result visualization on test images. Centerline detection on synthetic-3D-lanes examples (Left and middle columns) and
Delimiter detection on 3D-lanes real image examples (Right column). Detections with confidence > 0.5 are shown. Ground truth
(blue) and method result (red) shown in each image alongside a 3D visualization. Note that 3D axes are scene adaptive. Ignored lanes are
marked in cyan. The leftmost bottom example shows a failure in correctly assigning a lane split, probably caused by occlusion.
each producing a descriptor (one per view) which are then
concatenated and applied to candidate image locations. Li
et al. [19] use a CNN to detect lane markings along with ge-
ometrical attributes, such as local position and orientation,
directly on a top-view image which preserves invariance to
these properties. In addition they deploy a second, recurrent
network, that traverses the image to detect consistent lanes.
Neven et al. [25] use the horizon, predicted in each image
by a sub-network (“H-net”), to project the lanes to top-view
for improved curve fitting. In contrast to previous work, we
exploit both views in a synergistic single network approach.
More generally, we propose the first method that uses
an end-to-end trained CNN to directly detect multiple lanes
and estimate the 3D curvature for each such lane. We also
show that our method is applicable both to centerlines and
delimiters with an ability to handle splits and merges as
well, without any further post-processing.
3. Method
Our method gets as input a single image taken from a
front facing camera mounted on a vehicle as illustrated in
Figure 3. We assume known intrinsic camera parameters κ
(e.g. focal length, center of projection). We also assume
that the camera is installed at zero degrees roll relative to
the local ground plane. We do not assume a known cam-
era height and pitch since these may change due to vehicle
dynamics. The lanes in a road scene can be described both
by the set of centerlines {C
i
}
N
C
i=1
of each lane and by the
𝐶
𝑐𝑎𝑚𝑒𝑟𝑎
𝐶
𝑟𝑜𝑎𝑑
𝑇
𝑐2𝑟
θ
ℎ
𝑐𝑎𝑚
𝑦
𝑥
𝑧
ƴ𝑦
Camera pitch
ƴ𝑥
ƴ𝑧
Figure 3. Camera position and road projection plane
set of lane delimiters {D
i
}
N
D
i=1
as illustrated in Fig. 5. Each
such lane entity (centerline or delimiter) is a curve in 3D
expressed in camera coordinates (C
camera
). The task is to
detect either the set of lane centerlines and/or lane delim-
iters given the image.
3.1. Top-view projection
We briefly review Inverse Perspective Mapping (IPM).
In short, IPM is a homography that warps a front view im-
age to a virtual top view image as depicted in the top-left
image of Figure 1. It is equivalent to applying a camera
rotation homography (view is rotated downwards) followed
by an anisotropic scaling [11]. In our implementation we
want to ensure that each pixel in the top view image corre-
sponds to a predefined position on the road, independent of
the camera intrinsics and its pose relative to the road.
See Figure 3 for an illustration of the following defini-
tions. The camera coordinates C
camera
= (´x, ´y, ´z) are set
剩余13页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-09-29 上传
2021-05-20 上传
2017-10-14 上传
2019-09-16 上传
2011-04-28 上传
2023-07-08 上传

iOrigin
- 粉丝: 1
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
