虚拟环境下的远程机器人语音控制系统
"虚拟环境下机器人远程控制"
在当前的科技领域,虚拟环境技术与远程控制的结合正在推动机器人操作的新纪元。这篇论文介绍了一个创新的系统设计,它将虚拟环境技术应用于机器人远程控制,实现了通过语音识别来指挥远端机器人的功能。这个系统的核心在于,用户可以通过语音命令控制虚拟机器人,而虚拟机器人的动作会同步到真实的机器人上,同时提供机器人动作的图像反馈,确保控制的准确性和实时性。
系统的设计与开发由上海交通大学CIMS研究所与米兰理工大学机器人研究所合作完成。他们构建了一个基于虚拟环境的机器人远程控制系统,其中涉及到的关键技术包括语音识别、虚拟机器人建模、人机交互以及网络通信。
虚拟环境技术是系统的基础,它利用先进的图形生成和仿真技术创建了一个用户可以互动的可视化环境。在这个环境中,用户不仅可以看到虚拟机器人的操作,还能通过语音命令来操控它。这得益于语音识别技术,它允许用户用自然语言与系统交流,极大地提高了操作的便捷性。
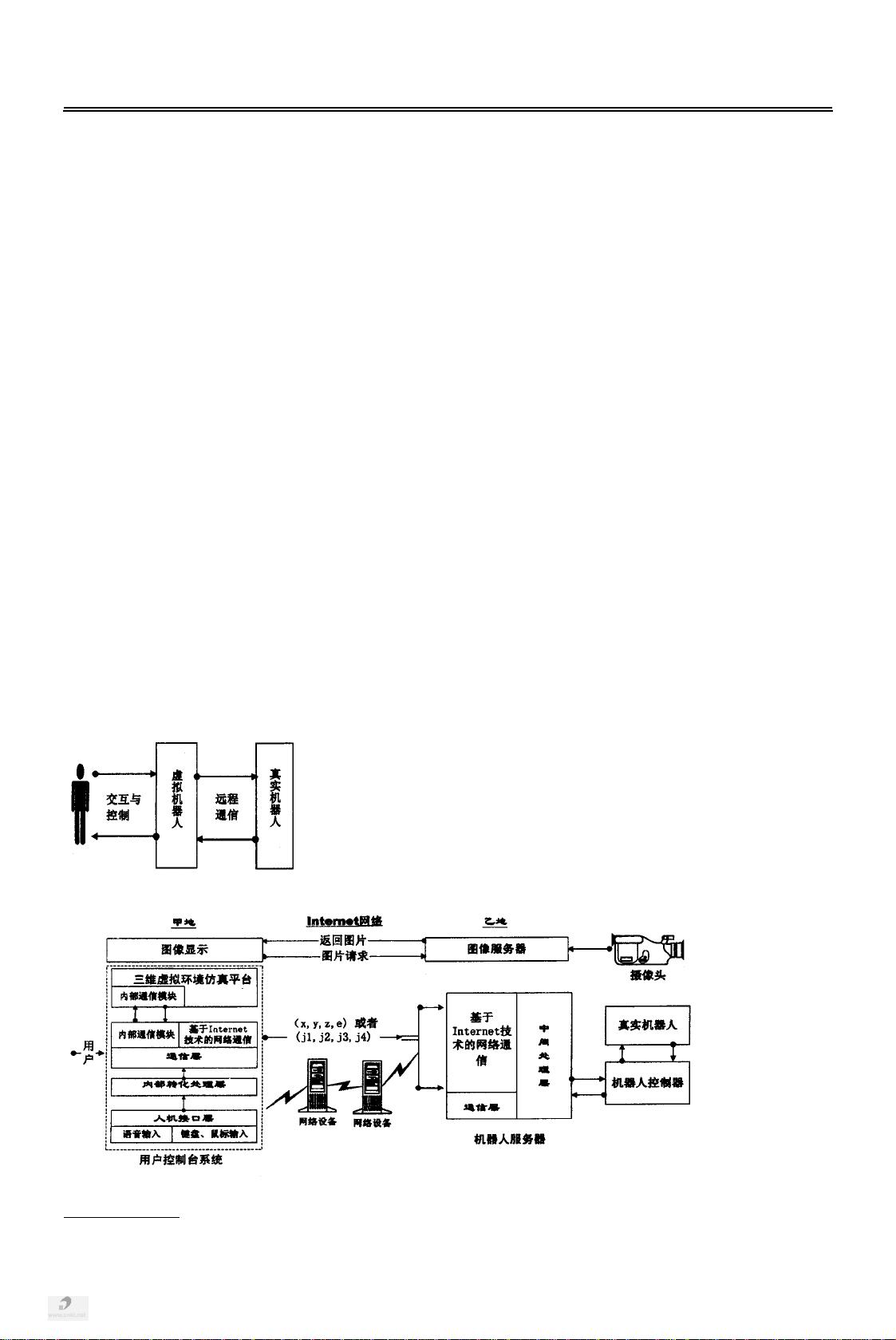
系统的框架如图1所示,它由两大部分组成:虚拟环境部分和实际机器人控制部分。虚拟环境部分负责接收用户的语音输入,解析成控制指令,并驱动虚拟机器人执行相应动作。同时,这些动作会被转化为信号,通过网络通信技术(如图2所示的系统框架)传输到真实的机器人,使其执行相同的操作。这种远程控制能力得益于现代通信技术的进步,使得跨越地理距离的实时控制成为可能。
虚拟环境中的机器人模型可以用于规划机器人的作业流程,模拟可能出现的各种情况,降低了实际操作中的风险。同时,多机器人协作的研究也可以在虚拟环境中进行,为复杂任务的协调提供解决方案。虚拟环境与实际机器人的联动,为远程监控和控制提供了全新的途径。
通过实际的系统运行测试,证明了这个基于虚拟环境的机器人远程控制系统是有效的。它可以广泛应用于各种场景,如制造业的自动化生产线、远程维修或危险环境下的无人操作等。这项工作为未来虚拟环境与机器人控制的进一步集成和应用奠定了坚实的基础,预示着在智能制造、远程服务和人机协作等领域有着广阔的应用前景。
收稿日期 :2002 - 10 - 17
基金项目 :国家自然科学基金资助项目
(
59889505
)
;国际合作项目
005507008
文章编号 :100622343
(
2003
)
032020203
虚拟环境下机器人远程控制
顾民强
1
, 范秀敏
1
, 马登哲
1
, Marco Ravera
2
, Alberto Rovetta
2
(
1. 上海交通大学 CIMS 研究所 上海 200030 ;2. 米兰理工大学 机器人研究所
)
摘 要 :结合虚拟环境技术与远程机器人控制技术 ,设计开发了一个基于虚拟环境的机器人远程控制系统 ,实
现了通过识别语音控制命令 ,控制虚拟机器人动作 ,带动远程机器人完成语音内容相应的动作 ,并进行机器人动作
的图像反馈。通过对真实机器人控制的系统运行 ,表明该控制系统的有效性。
关键词 :机器人 ;远程控制 ;虚拟环境技术
中图分类号 : TP391. 9 ; TP242 文献标识码 :A
▲图 1 虚拟环境下机器人控制的示意
▲图 2 系统框架
虚拟环境技术
(
Virtual Environment
)
及其相关技术作为
一个新兴的计算机研究应用领域 ,在最近的十多年中得到了
飞速的发展。这种发展得益于计算机硬件
(
尤其是图形设
备
)
、制造技术的进步 ,也得益于软件技术的飞速发展。虚拟
环境技术融合了实时图形生成技术 、人机交互技术和仿真技
术于一身 ,为人们在计算机系统中创造了一个可视化、可参
与的虚拟世界。就目前而言 ,虚拟环境/ 虚拟现实技术已经
进入实用阶段 ,其主要应用领域包括国防军事、驾驶训练、制
造业、建筑业以及娱乐业等方面。
虚拟环境技术应用于制造业中 ,其中一个重要的方面是
研究如何把虚拟环境技术与机器人的自动化作业相结合。通
过建立一个与真实机器人相对应的虚拟机器人模型 ,以可视
化的方式规划机器人的作业步骤
[2 ]
,同时还可以研究多机器
人的协同工作问题。另一方面 ,可以通过虚拟机器人的作业
来直接控制对应的真
实机器人。此外 ,随着
通信技术的发展 ,对真
实机器人的控制可以
借助网络通信技术 ,从
而使异地远程控制得
以可能
[3 ]
。
在本文中 ,与意大利米兰理工学院机器人研究所合作 ,
探索建立一个基于虚拟环境技术的机器人远程控制系统 ,综
合了虚拟机器人的仿真、多方式控制和 Internet 网络技术为
一体 ,为进一步的应用拓展奠定基础。
1 系统总体设计
实现一个基于虚拟环境技术的机器人远程控制系统 ,包
含两个基本部分 :一个是虚拟机器人部分 ,另一个是真实机
器人部分 ,其基本内容如图 1 所示。
在虚拟机器人这一端 ,通过三维图形仿真技术来实时显
示虚拟机器人 ,同时能够规划和控制虚拟机器人的运动过
程 ;此外 ,还引入虚拟环境的交互技术 ,为操作人员提供与虚
拟机器人进行交互的手段 。而在真实机器人这一端 ,通过得
到虚拟机器人的运动数据来控制真实机器人的运动。
通过分析上述系统的基本特征 ,并进行功能细化 ,我们
建立了基于因特网的异地服务/ 客户方式的虚拟环境机器人
远程控制原型系统 ,如图 2 所示。系统结构从功能上可以划
分为三个子系统 :用户控制台系统、机器人服务器、图像接收
服务器 ,还有包含于子系统内部或之间的通信模块。下文主
要描述其中的两个子系统 :
1. 1 用户控制台系统
用户控制台系统
是虚拟机器人所在的
子系统 , 包括虚拟场
景、通信模块、内部处
理模块和人机接口模
拟等 4 个层次。
(
1
)
虚拟 场 景
的创建
场景主要包括机
器人本身、周边设备
和环境因素
(
如光照
)
等。场景的建立一般
可以根据真实机器人
的工作场所 , 在实地
测量的基础上 ,通过相关的建模软件建立场景模型。场景建
模按下列两步实现 :
①建立各种实体的几何模型。几何建模可以采用多种
第 19 卷第 3 期
2003 年 6 月
机械设计与研究
Machine Design and Research
Vol. 19 No. 3
Jun. ,2003
© 1995-2003 Tsinghua Tongfang Optical Disc Co., Ltd. All rights reserved.
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-11 上传
2021-08-14 上传
2021-08-14 上传
2021-08-14 上传
2021-08-11 上传
2021-08-11 上传
2021-09-19 上传
点击了解资源详情
点击了解资源详情


ldruth28
- 粉丝: 15
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
