Ubuntu 18.04下g20视觉SLAM关键组件解析
需积分: 19 141 浏览量
更新于2024-08-26
1
收藏 260KB DOCX 举报
在"视觉SLAM——g20学习总结"这篇文档中,主要讨论了在Ubuntu 18.04环境下使用g20进行SLAM(Simultaneous Localization And Mapping)时的关键组件及其工作原理。g20是一个强大的SLAM框架,核心是SparseOptimizer,它不仅是一个OptimizableGraph(优化图),同时也是HyperGraph(超图)的概念体现,包含了多个顶点(OptimizableGraph::Vertex)和边(BaseUnaryEdge, BaseBinaryEdge, 或 BaseMultiEdge)。
SparseOptimizer中的关键部分是OptimizationAlgorithm,它通常通过Gauss-Newton (GN), Levenberg-Marquardt (LM), 或 Powell's dogleg等迭代策略实现优化。OptimizationWithHessian内部包含一个Solver(求解器),负责解决优化过程中的线性方程。这个Solver由BlockSolver组成,其中涉及到稀疏矩阵的处理,包括计算雅可比矩阵(Jacobian)和Hessian矩阵。
BlockSolver的核心组成部分是SparseBlockMatrix,用于高效地处理大规模稀疏矩阵,以及一个LinearSolver,如LinearSolverCholmod、LinearSolverCSparse和LinearSolverPC。这些线性求解器的选择至关重要,因为它们决定了解决大尺寸Hessian方程组的方法。例如:
- LinearSolverCholmod:采用sparse cholesky分解法,它基于Cholesky分解,适用于数据量较大但结构相对简单的场景,性能较好。
- LinearSolverCSparse:利用CSparse方法,可能更适合对内存使用有严格限制的情况,因为它是基于CSparse库的。
- LinearSolverPC:具体可能是Preconditioned Conjugate Gradient (PCG)求解器,一种常用的迭代求解线性系统的方法,特别适用于大规模稀疏线性系统的求解。
这篇文档深入剖析了g20中关键优化算法的实现细节,特别是在处理大规模图优化问题时,如何通过高效的矩阵运算和求解策略来提升SLAM性能。对于理解和开发SLAM系统,特别是使用g20作为基础的开发者来说,这部分内容提供了宝贵的技术参考。
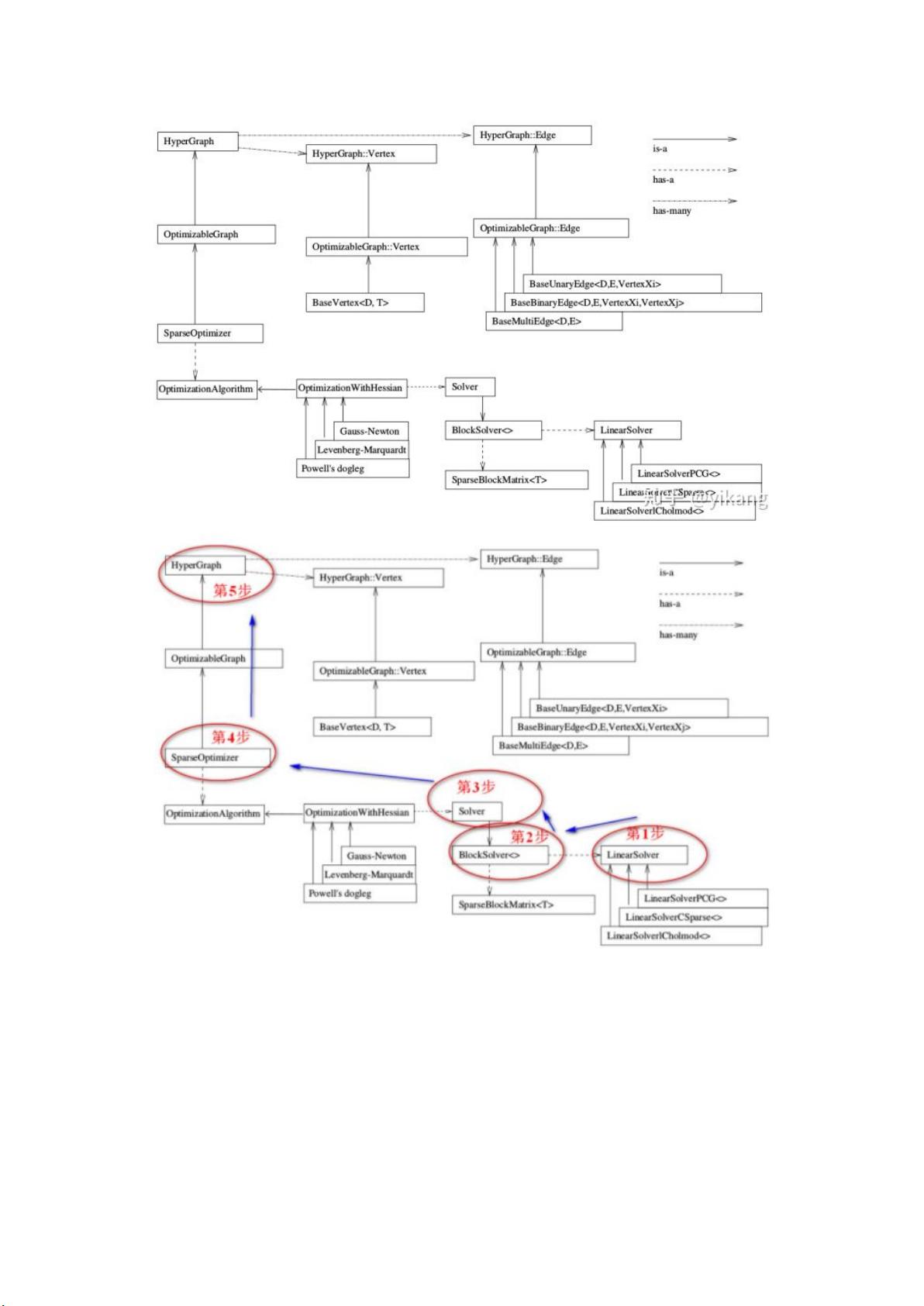
SparseOptimizer 是整个图的核心,我们注意右上角的 is-a (是一个) 实心箭
头 , 这 个 Sparse Optimizer 它 是 一 个 OptimizableGraph , 从 而 也 是 一 个 超 图
(HyperGraph)。
注意看 has-many (有很多) 箭头,你看这个超图包含了许多顶点(Hyper
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-01-20 上传
2021-01-20 上传
2021-01-20 上传
2021-01-06 上传
109 浏览量

三心居士
- 粉丝: 2
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
