
第
36
卷第
1
期
2013
年
2
月
电子器件
Vo
l. 36
No.l
Feb.2013
Chinese Joumal of Electron Devices
Design
of
Hexapod Bionic Robot Based on STC Microcontroller *
WU Hongqi * ,
GUO
Mengyu
(Dept. Electronics & Elect. Eng.
,
B
α
oji
Coll.
Arts & Sci. ,Baoji
Sh
α
田总
721007
,
China)
Abstract:
To
satisfy the requests of special conditions for the robot , a hexapod robot is designed by using bionics
principle which can mimic the motion of some anima
l. The
STC
microcontroller is used as the core of control circuit.
The
AE
T1
68Pl
steering gear control panel
Ìs
used
to
drive the sports joints through the YZW - Y
09G
type steering
gear.
It
can achieve each function of application requirements under software control. The robot has a strong
adaptability
to
all sorts of the ground condition, such as it is not easy to fall into the soft ground. The system has
shown its high value such as
low
cost , strong anti -interference capacity, high sensitivity and reliability.
Key
words:
biomimetic robots; control ;
SCM
; steering gear
EEACC
:7210 ;
7230J
doi
:10.
3969/j.
issn.l005-9490.
2013. 0
1.
030
基于
STC
单片机的仿生六足机器人设计*
吴宏岐*郭梦宇
(宝鸡文理学院电子电气工程系,陕西宝鸡
721007)
摘
要:为满足特殊环境对于机器人的提出的要求,应用仿生学原理,设计一六足机器人,可模仿生物的运动形式;它以
STC12C5A60S2
型单片机为控制核心,通过
YZW-Y09G
型舵机来驱动的运动关节,选用
AE
Tl
68Pl
舵机控制板,在系统软件控
制下来实现其各项功能。这种仿生六足机器人对各种地面有很强的适应能力,不易陷入松软地面里,且制作成本低,抗干扰
能力强、灵敏度高、安全可靠,具有较高的使用价值。
关键词:仿生机器人;控制;单片机;舵机
中图分类号
:T
P2
42
文献标识码
:A
文章编号
:1005-9490(2013)01-0128-04
在自然界和人类社会中存在一些可能危及人类
生命的特殊场合。灾难发生矿井、防灾救援和反恐
斗争等,对这些危险环境进行不断地探索和研究,寻
求一条解决问题的可行途径成为科学技术发展和人
类社会进步的需要。地形不规则和崎岖不平是这些
环境的共同特点。从而使轮式机器人和履带式机器
人的应用受到限制。与轮式、履带式移动机器人相
比,多足步行机器人的腿部具有多个自由度,使其运
动的灵活性大大增强。它可以通过调节腿的长度保
持身体水平也可以通过调节腿的伸展程度调整重心
的位置因此不易翻倒
[4]
。在这种背景下多足步行
机器人的研究非常重要,而仿生步行机器人的出现
更加显示出步行机器人的优势。
1
六足机器人仿生原理及总体设计方案
1. 1
步态仿生原理
六足步行机器人的步态是多样的,其中三角步态
项目来源:宝鸡市自然科学基金项目(l1
K
G0
6-1
)
收稿日期
:2012
一
08-14
修改日期
:2012-09-03
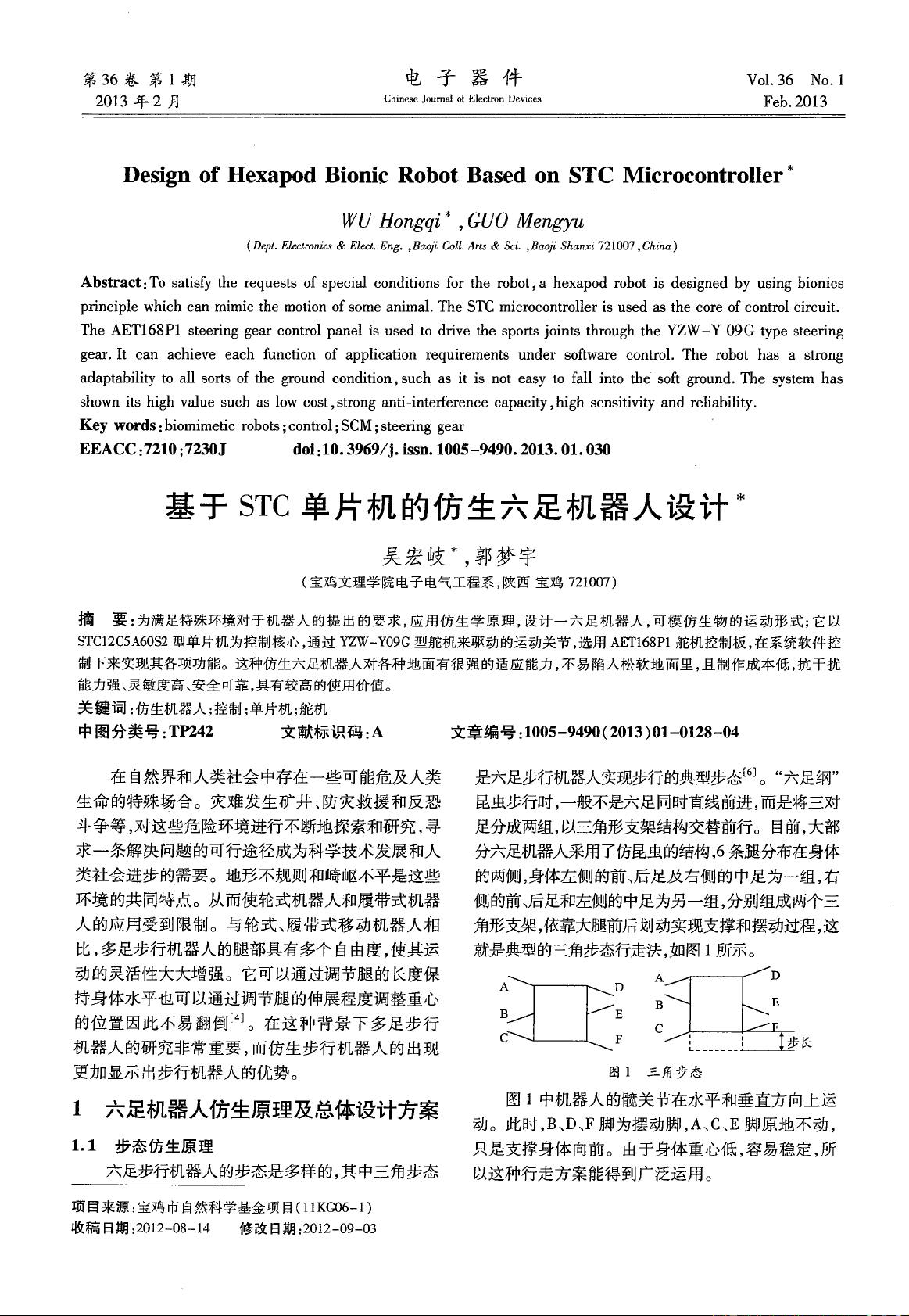
是六足步行机器人实现步行的典型步态
[6]
。"六足纲"
昆虫步行时,一般不是六足同时直线前进,而是将三对
足分成两组,以三角形支架结构交替前行。目前,大部
分六足机器人采用了仿昆虫的结构,
6
条腿分布在身体
的两侧,身体左侧的前、后足及右侧的中足为一组,右
侧的前、后足和左侧的中足为另一组,分别组成两个三
角形支架,依靠大腿前后划动实现支撑和摆动过程,这
就是典型的三角步态行走法,如图
1
所示。
jFE;
A
B
C
图
1
三角步态
图
1
中机器人的髓关节在水平和垂直方向上运
动。此时,
B
、
D
,
F
脚为摆动脚,
A
、
C
、
E
脚原地不动,
只是支撑身体向前。由于身体重心低,容易稳定,所
以这种行走方案能得到广泛运用。
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38673738
- 粉丝: 2
- 资源: 914
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高效办公必备:可易文件夹批量生成器
- 吉林大学图形学与人机交互课程作业解析
- 8086与8255打造简易乒乓球游戏机教程
- Win10下C++开发工具包:Bongo Cat Mver、GLEW、GLFW
- Bootstrap前端开发:六页果蔬展示页面
- MacOS兼容版VSCode 1.85.1:最后支持10.13.x版本
- 掌握cpp2uml工具及其使用方法指南
- C51单片机星形流水灯设计与Proteus仿真教程
- 深度远程启动管理器使用教程与工具包
- SAAS云建站平台,一台服务器支持数万独立网站
- Java开发的博客API系统:完整功能与接口文档
- 掌握SecureCRT:打造高效SSH超级终端
- JAVA飞机大战游戏实现与源码分享
- SSM框架开发的在线考试系统设计与实现
- MEMS捷联惯导解算与MATLAB仿真指南
- Java实现的学生考试系统开发实战教程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


