
3
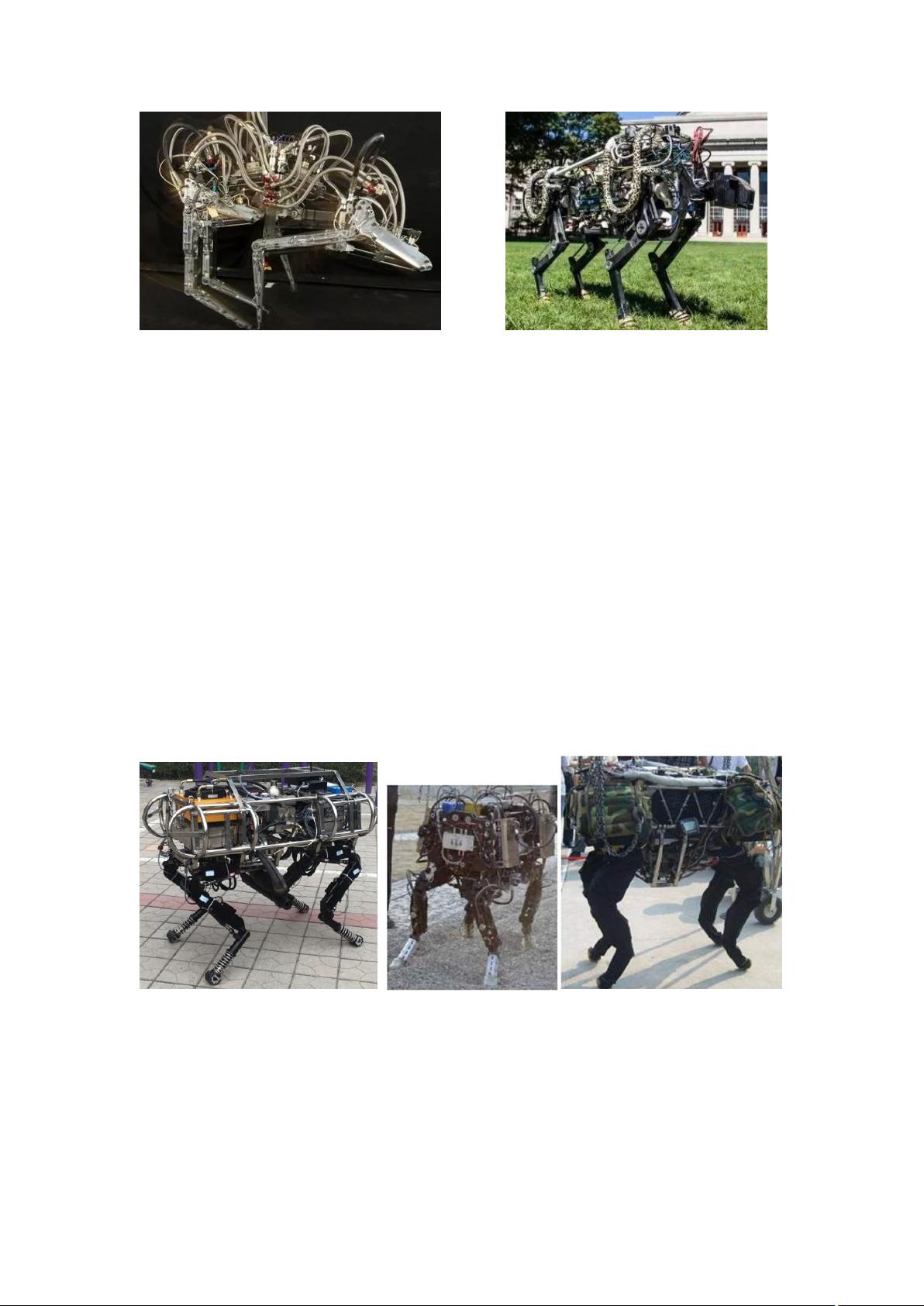
图 1.3 Cheetah 机器人 图 1.4 Cheetah Robot V.2 机器人
1.2.2 国内研究概况
近年国内高向和研究机构在 863 计划“高性能四足仿生机器人”等国家科研
计划支持下,研发了多种液压动力的四足机器人样机。山东大学、哈尔滨工业大
学与华中科技大学等单位研制的四足机器人“MBBOT”,以及上海交通大学、清
华大学研制的四足机器人等。也从这些学校里面萌芽了许多关于四足机器人的大
学生创业企业如宇树科技、蔚蓝阿尔法机器狗还有沃奇智能机器人等。这些机器
人能够实现负重下的蹲起、原地踏步、对角小跑、10°爬坡等运动。
以山东大学为例简单介绍一下国内高校研发的四足机器人,因为国内高校研
发的四足机器人方向大致相同,因此只举一例,它的研究方向是跟随着美国波士
顿动力给军方研制的 Big Dog 四足机器人的形式研制的。以液压伺服作为动力源,
腿部有缓冲装置,能起到缓冲作用,并且将一部分机械能转换成机器人的动力,
脚底有 PVDF(压电薄膜)测力传感器作为反馈控制。
图 1.5 山东大学样机 图 1.6 哈尔滨工业大学样机 图 1.7 上海交通大学样机
基本上国内高校研制的四足机器人,都是奔着 Big Dog 的方向去的,都是
以液压伺服为动力,承载大、算法能适应各种复杂地形、抗扰能力强为主要的研
究目标。而且国内更注重四足机器人的算法控制,对机械结构并不是很重视,尤
其是液压伺服的设计,与波士顿动力相比,并不是很紧凑。但是也有一些高校在
剩余33页未读,继续阅读

南抖北快东卫
- 粉丝: 73
- 资源: 5588

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







