FANUC机器人SRVO-105与SRVO-199报警解决方法
版权申诉
185 浏览量
更新于2024-09-06
2
收藏 1.1MB DOCX 举报
"这篇文档详细分析了FANUC机器人在运行过程中出现的SRVO-105和SRVO-199两个报警的原因,并提供了相应的处理对策。SRVO-105报警通常表示门打开或紧急停止,可能是控制柜门未关或紧急停止信号触发,而SRVO-199报警则是PAUSE.G控制停止。在实际排查中,发现是UI[1]IMSTP信号异常,即UI[1]变为OFF导致的SRVO-105报警。通过检查控制柜中的PLC与机器人之间的IO通信线路,发现+24V电源线接线端子松动,修复后问题得到解决。文档建议在现代工业自动化系统中,使用如PROFINET这样的以太网通讯协议,以提高信号传输的稳定性和维护的便利性。"
在FANUC机器人系统中,SRVO-105和SRVO-199报警是两个常见的故障指示。SRVO-105报警意味着机器人的控制系统检测到了门被打开或者是紧急停止信号被激活。这可能是由于物理上的控制柜门未关闭,或是系统在短时间内接收到紧急停止指令。该报警可能由控制装置与示教器规格不匹配或硬件问题引起。而SRVO-199报警则表示机器人执行了控制停止,即PAUSE.G状态,它通常用于通知用户机器人暂停运行。
在具体排查过程中,技术人员首先确认了控制柜门未开启,且控制装置和示教器的规格匹配,从而排除了这些可能性。进一步分析发现,UI[1]IMSTP信号异常,正常状态下应为ON,但此时却变成OFF,导致了SRVO-105报警。UI信号是机器人接收外部控制信号的关键,UI[1]、UI[2]、UI[3]、UI[8]四个信号都应保持ON状态,任何信号的异常都可能引发问题。
通过检查PLC与机器人之间的IO通信线路,发现+24V电源线接线端子松动,这是导致UI[1]信号异常的原因。修复接线后,输入信号恢复正常,故障得以消除。此案例提醒我们,传统的IO通信方式虽然直观,但接线复杂,一旦线路出现问题,定位和修复相对困难。
为了提高系统的稳定性和维护效率,现代工业自动化系统常推荐使用如PROFINET这样的以太网通信协议。PROFINET提供更稳定的信号传输,并简化了故障排查和维护工作。在遇到类似问题时,利用电脑联机查看异常状态,结合网络通讯协议的特性,可以更有效地找出问题根源并进行修复。
FANUC 机器人 SRVO-105 和 SRVO-199 报警原因分析及处理对策
本次的报警发生时,同时出现了 SRVO-105 和 SRVO-199 两个报警信息,机器人由于报
警立即停止了动作。
首先,我们来看一下这两个报警信息的具体内容:
SRVO-105:门打开或紧急停止
原因:
1. 控制装置的柜门打开,或者短时间内检测出了紧急停止信号
2. 可能由于控制装置和示教器的规格不一致或硬件故障所致。
SRVO-199:PAUSE.G 控制停止
此报警用来通知执行了控制停止的事实。
查看了这两条报警的说明后,简单分析了一下:
1. 控制装置的柜门没有打开
2. 控制装置和示教器规格肯定是一致的,一直都是正常的,硬件故障现在暂时还无法判
断
综上分析,首先判断为:机器人在短时间内检测出了紧急停止信号,即 UI[1] IMSTP 信号
OFF 了,正常情况下应该为 ON 的。
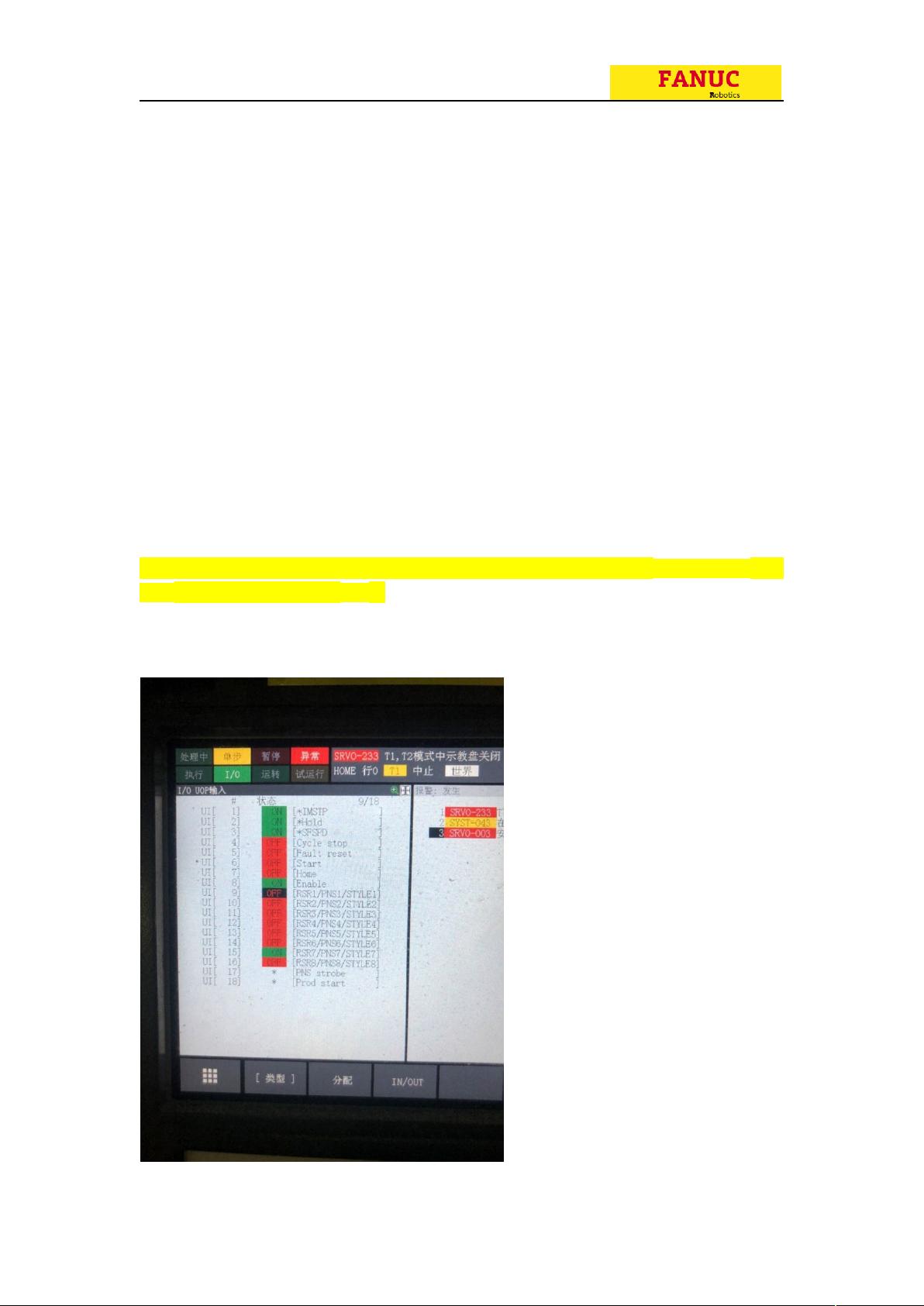
查看了下 UI 信号,如下图所示,正常情况下,UI[1]、UI[2]、UI[3]、UI[8]4 个信号都应
该为 ON 的,若某个时刻,UI[1]为 OFF 了,即会出现 SRVO-105 报警。
下载后可阅读完整内容,剩余3页未读,立即下载
1066 浏览量
3801 浏览量
11640 浏览量
492 浏览量
2579 浏览量
2738 浏览量
3801 浏览量
478 浏览量
1232 浏览量

AAA_自动化工程师
- 粉丝: 7141
- 资源: 3492
 我的内容管理
展开
我的内容管理
展开







最新资源
- app-subtags:BCP 47语言标记是从IANA子标记注册表中的子标记构建的。 此工具可帮助您查找或查找子标签并检查语言标签中的错误
- pwdhash-webextension:用于Firefox的PwdHash Webextension
- Moveit
- alloc.h头文件
- 易语言-易语言多线程例子
- a-lumen-blog
- easyrdf:EasyRdf是一个PHP库,旨在使其易于使用和产生RDF
- 数据库课程设计 网址.zip
- 关于车辆控制装置,车辆控制方法和车辆控制系统的介绍说明.rar
- 如何使用Visual Studio 2008创建用于Postgresql数据库的数据库项目?
- sk8erboyz:专案1第1组
- c51单片机 用74HC273输出数据(51/96/88/ARM)
- .net简单订票系统开发.zip
- CJL 插件实现 Js 图片旋转
- todoListW3S:W3S TodoList
- QDate
