FANUC机器人SRVO-037 IMSTP急停报警解决指南
版权申诉
"这篇文档详细解析了FANUC机器人出现SRVO-037 IMSTP输入急停报警的原因及解决步骤,主要涉及了FANUC机器人与外围设备的I/O交互,特别是IMSTP信号中断的问题。"
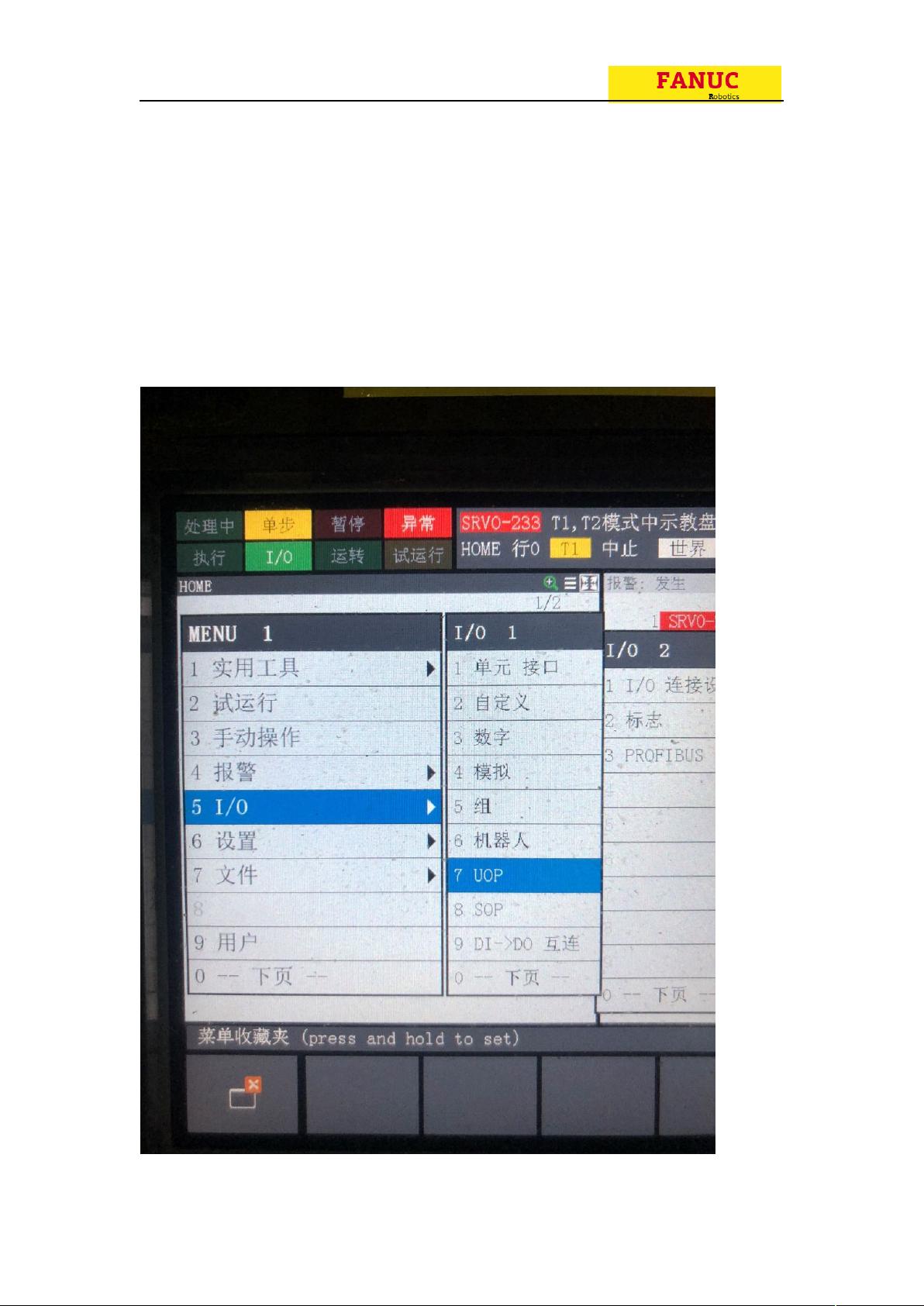
FANUC机器人在运行过程中,如果出现SRVO-037报警,意味着外围设备的I/O接口中的*IMST信号断开,导致机器人停止工作。IMSTP是紧急停止信号,当这个信号断开时,机器人为了安全考虑会立即停止动作。要解决这个问题,首先要理解IMSTP信号的作用。在FANUC机器人的MENU—I/O—UOP设置中,可以看到UI[1]、UI[2]、UI[3]、UI[8]这四个信号应当始终保持ON状态,无论机器人处于手动还是自动模式。如果其中任何一个信号丢失,都会触发SRVO-037报警。
接下来,需要检查这些信号的分配和连接情况。在"F2分配"中确认机架号和UI的起始点是否正确,如果有误,需要重新分配。对于本文档中的案例,通信方式是IO硬接线,通过CRMA52A和CRMA52B电缆将信号传递至控制柜。在这个系统中,信号通过PCB-FX-134端子板进行输入和输出,17号引脚代表0V,1、2、3、8号引脚对应UI[1]至UI[8]。使用万用表测量这些引脚与0V之间的电压,若无24V,表明信号未正常传输。
此时,故障可能出在信号板、电缆或连接上。如果发现24V缺失,应进一步检查24V电源的来源,如中间继电器和PLC。如果中间继电器工作正常,那么问题可能出在连接线或继电器到信号板的线路;如果中间继电器存在问题,需要更换。如果PLC侧的信号未正常发送,需要检查PLC的软件程序,确保控制信号的逻辑正确。
解决FANUC机器人SRVO-037报警的关键在于确保IMSTP信号的畅通,涉及对硬件连接、电源、继电器和PLC软件的全面排查。通过这种方法,可以定位并修复问题,使机器人恢复正常运行。在实际操作中,熟悉机器人系统和I/O交互原理至关重要,以便能迅速诊断并解决类似故障。
FANUC 机器人 SRVO-037 IMSTP 输入急停报警原因分析及处理步骤
首先,我们来看一下 SRVO-037 这个报警的具体含义:
原因:外围设备 I/O 的*IMST 信号断开
对策:接通*IMSTP 信号
单从报警说明书上我们只能了解是 IMSTP 这个急停信号断开了,导致出现 SRVO-037 报
警。
那么我们需要来看一下 IMSTP 这个信号的作用,如下图所示,我们打开 MENU—I/O—
UOP,
下载后可阅读完整内容,剩余6页未读,立即下载
15234 浏览量
4671 浏览量
2024-10-28 上传
2024-10-28 上传
2024-11-07 上传
2024-10-28 上传
2024-11-07 上传
2024-11-07 上传

AAA_自动化工程师
- 粉丝: 7146
- 资源: 3492
 我的内容管理
展开
我的内容管理
展开







最新资源
- 上海大众供应商物流与采购过程分析规则
- ubs-for-uta-6324:适用于utaSpring2021的ubs系统adv sse 6324课程
- Open Source on the Xbox 360:xbox360 游戏机上的 UNIX/LINUX 和合法自制软件-开源
- 里科米达
- Sarkari Job-crx插件
- ShengSanYi-ArduinoEsp8266-master.zip
- domocracy:Domocracy 的开源工具
- 设施规划与物流分析PDF
- COMPENG-2DX4:该存储库保存了我的2021年冬季微处理器系统项目课程中所用的代码,在该课程中,我学习了如何对ARM MSP-EXP432微控制器进行编程。 我在各种外围设备(包括电机和键盘)上使用了ARM-Assembly,ARM-C和Python,所有这些都构成了构建LIDAR映射传感器的最终项目
- biningo
- project-flyer:我的克隆项目传单
- jquery.page分页控件02.zip
- 4EnRaya:我首先通过控制台在三个版本中连续玩四个,然后是摇摆,最后是在线
- ShopOnline.DotNetCore3:ShopOnline.DotNetCore3
- 图形化-班级成绩管理系统.zip
- CSCI370-Lab_04:异步任务
