
大连交通大学全日制专业硕士学位论文
Gray (x, y ) = W
r
* R (x, y ) + W
g
* G (x, y ) + W
b
* B (x, y ) (2. 10)
R、G 、B 三个分量的权重值分别为W
r
、W
g
、W
b ,
且W
r
+ W
g
+ W
b
= 1。
因为人眼对每种颜色敏感度有差异, 所以每个分量所取权重值也有差异。通常, 对
G 敏感最高,对 B 敏感最低, R 居中,因此图像灰度值根据式(2. 11)计算相对合理:
Gray (x, y ) = 0.299 * R (x, y ) + 0.589 * G (x, y ) + 0. 112B (x, y ) (2. 11)
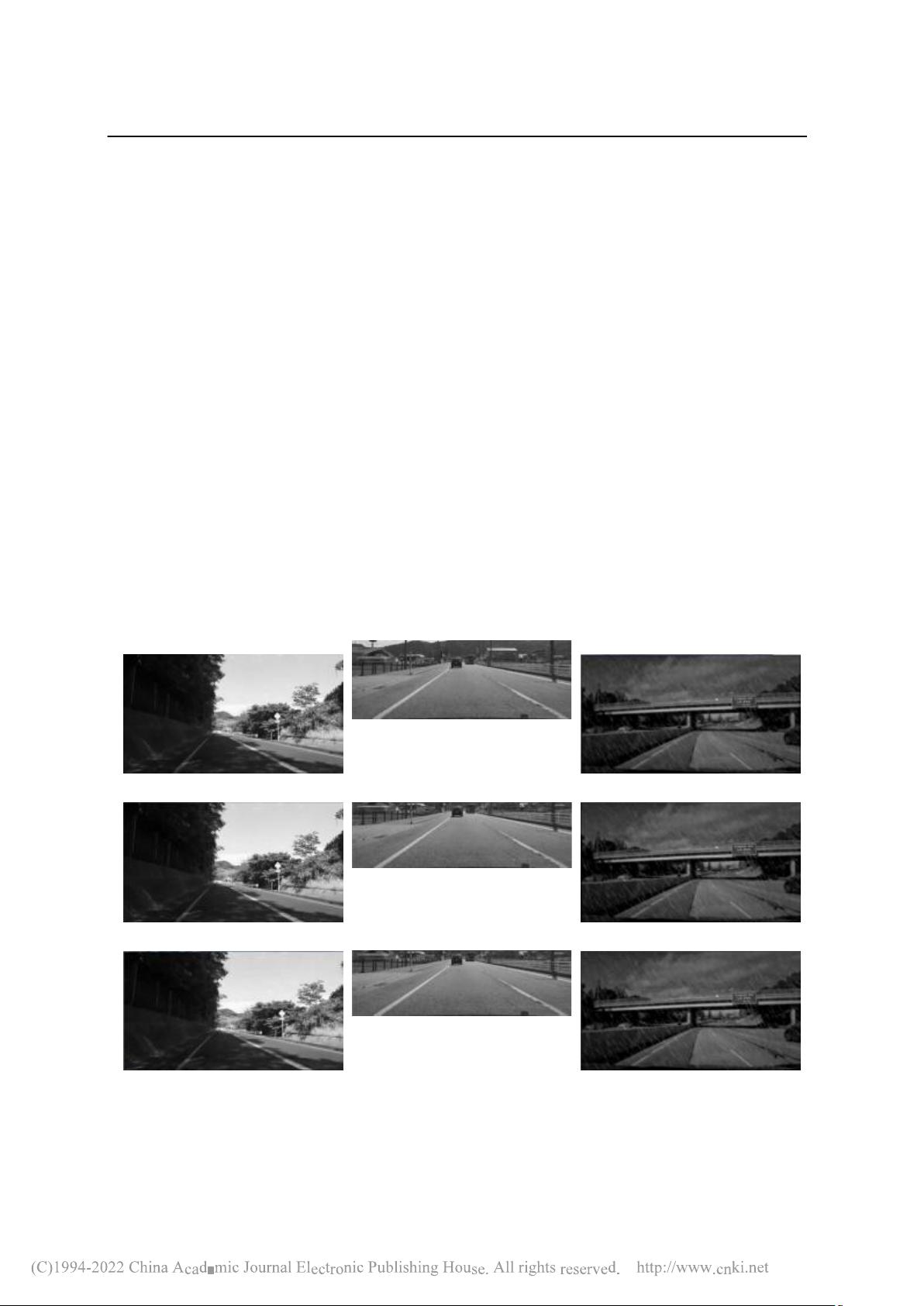
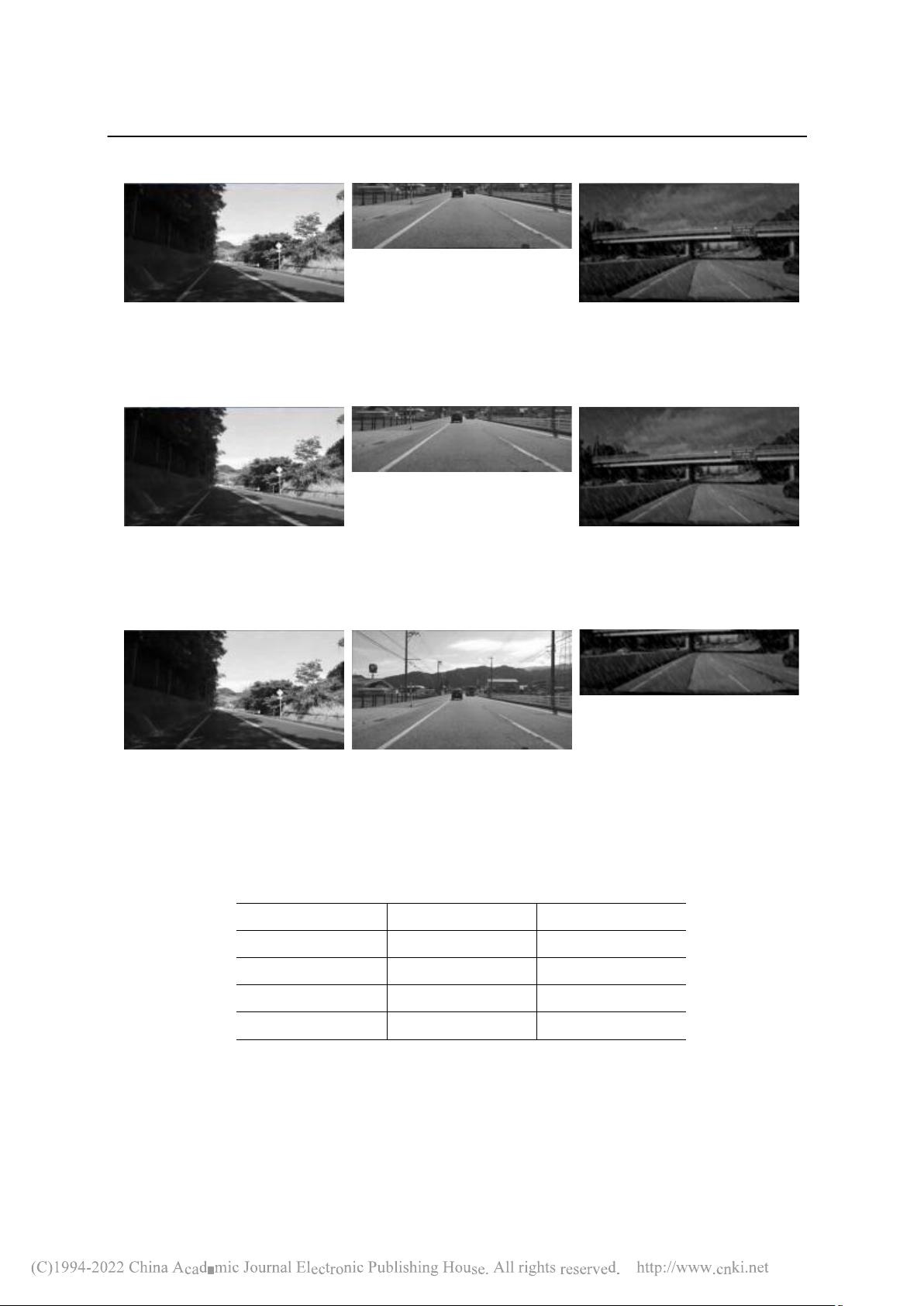
2.3.2 道路图像灰度化及分析
根据由摄像机获取的原始道路图像经过 2.2.3 节的颜色分割处理,得到有明显车道
线信息的道路图像, 分别利用上文阐述的四种灰度化方法对图 2.6 做处理。图 2.7 、2.8、
2.9、2.10 分别为利用分量法、最大值法、平均值法、加权平均值法对原始道路图像滤波
的结果。其中,图 2.7(a)(b)(c)是以B (x , y )分量作为灰度化分量值的结果,图 2.7(d)(e)(f)
是以G(x, y )分量作为灰度化分量值的结果, 图 2.7(g)(h)(i)是以R (x , y )分量作为灰度化分
量值的结果
[71]
。再对这四种灰度化方法的人类视觉感受效果和车道线凸显效果进行对
比,如表 2.3 所示。
(a) B (x , y )分量值灰度化 (b) B (x , y )分量值灰度化 (c) B (x , y )分量值灰度化
(d) G (x, y )分量值灰度化 (e) G (x, y )分量值灰度化 (f) G (x, y )分量值灰度化
(g) R (x , y )分量值灰度化 (h) R (x , y )分量值灰度化 (i) R (x , y )分量值灰度化
图 2.7 分量法灰度化道路图像结果
Fig. 2.7 Results of road images grayscale by component method
14
剩余31页未读,继续阅读
















