车载LiDAR点云的自动建筑物立面提取与高效索引算法
需积分: 0 126 浏览量
更新于2024-06-29
收藏 1.25MB DOCX 举报
车载LiDAR点云的建筑物立面信息快速自动提取是一篇关于地理信息技术和遥感领域的研究论文。车载LiDAR(Light Detection and Ranging,激光雷达)是一种高精度的移动测量技术,其产生的大量三维点云数据包含丰富的建筑物细节,包括建筑物的立面信息。本文主要关注如何在处理这些海量数据时提高效率,尤其是在提取建筑物表面特征方面。
论文的核心内容围绕车载LiDAR点云的处理展开,针对点云数据的三维离散性、高密度和数据量大的特性,作者提出了一种创新的索引算法——3DGrid_Hash_Octree。这是一种基于3D规则格网和哈希表的线性八叉树索引结构,利用这种算法,能够有效地构建点云数据的索引并加速邻域搜索。这种方法在实际应用中的高效性在第2章中得到了实测数据的支持,这表明该算法对于大规模点云数据处理具有显著的优势。
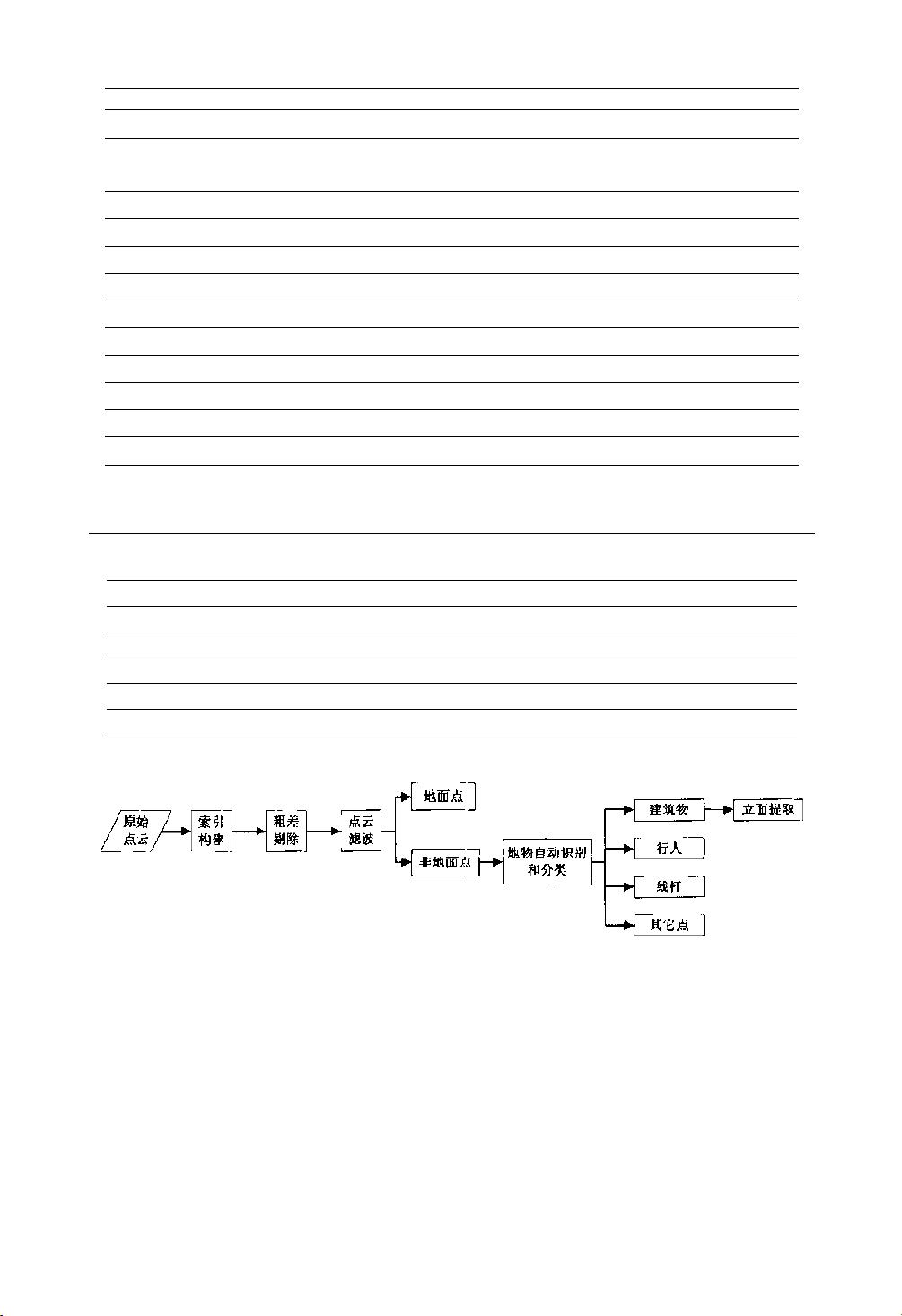
针对点云数据中地面点的混杂和噪声问题,论文提出了地形自适应的地面点滤波方法。这一方法通过对疑似地面点进行智能筛选,减少误识别,从而提高建筑物立面信息的提取精度。这种方法对于处理复杂地形环境下的点云数据尤其关键,有助于提取出更加准确的建筑物轮廓和表面纹理。
论文的作者冯义从,于2007年攻读地图制图学与地理信息工程专业,指导老师为岑敏仪教授,于2014年完成了这项研究。论文不仅探讨了理论方法,还通过实证研究验证了其有效性,这对于推动车载LiDAR技术在城市规划、测绘和无人驾驶等领域中的应用具有重要意义。
此外,论文还包含了关于知识产权的声明,确认了作者对其研究成果的权益,并明确了论文的保密性和解密后的使用授权。这篇论文在创新性上强调了作者对车载LiDAR点云处理技术的独特贡献,以及其在实际场景中解决挑战的能力。
车载LiDAR点云的建筑物立面信息快速自动提取研究旨在提供一种高效的数据处理和分析工具,对于提升地理信息系统的性能和自动化程度具有重要的学术价值和实际应用价值。

第4页 西南交通大学博士研究生学位论文
万方数据
1.1.2车载LiDAR应用与数据处理难点
车载LiDAR可以在移动中同步获取目标物的高精度三维点云数据和高分辨率影像 信息,克服了
机载LiDAR点云建筑物立面信息欠缺、固定式LiDAR移动性差的缺点。 而且车载LiDAR数据扫描
视角符合地面行人的视觉特点,更加贴近行人的常规视觉感 受,因此成为3D城市建模中获取建筑物
立面信息的最佳手段之一罔剧。此外,车载LiDAR 还可用于城市道路信息提取
[10L[11
\道路安全检
测⑫、树木生长监测H3H15]、管线铺设网、 工厂设计〔削、工程监测(土石方的快速计算)等领域
。
与机载LiDAR相比,由于车载LiDAR的数据高密度性、点云分布不均、真3D和 地物目标复杂性
等特点,车载LiDAR数据后处理不能完全采用机载LiDAR的数据后处 理算法,在建筑物立面信息的
自动提取过程中,容易出现点云索引效率低、地面点滤波 和地物自动识别困难、平面过度分割和伪平
面等问题。
1.2车载LiDAR数据后处理研究现状
随着车载LiDAR系统相关软硬件技术如GPS动态定位精度的提高以及惯性导航 (Inertial
Measurement Unit, IMU)、距离测量(Distance Measurement Indicator, DMI) 的发展,近年来车载激
光扫描系统的研究与数据后处理研究开始引起国内外学者和研究 机构的兴趣。
1.2.1车载LiDAR系统研发进展
车载LiDAR _般由定位定向系统(Position and Orientation System, POS)、数字摄像 机(Digital
Camera)、激光扫描仪(Light Dectection and Ranging, LiDAR)与工业计算机 等部分组成,如下图1-5
为某车载LiDAR系统,车辆顶部装有GPS接收机、激光扫描 仪、数码摄像机,车辆内部装有工业计算
机等数据实时处理设备:
图1-5车载LiDAR系统外观及组成
其中定位定向系统作为车载LiDAR系统的核心,由全球导航卫星系统(Global Navigation
Satellite System, GNSS)> 距离测量装置(Distance Measurement Indicator, DMI)、惯性测量装置
(Inertial Measurement Unit, IMU)和姿态计算系统(Position Computation System, PCS), POS系统可


剩余135页未读,继续阅读
2022-05-31 上传
2023-08-19 上传
2022-06-18 上传
2023-02-23 上传
2021-09-20 上传
2021-09-20 上传

zmsdbl
- 粉丝: 33
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 天池大数据比赛:伪造人脸图像检测技术
- ADS1118数据手册中英文版合集
- Laravel 4/5包增强Eloquent模型本地化功能
- UCOSII 2.91版成功移植至STM8L平台
- 蓝色细线风格的PPT鱼骨图设计
- 基于Python的抖音舆情数据可视化分析系统
- C语言双人版游戏设计:别踩白块儿
- 创新色彩搭配的PPT鱼骨图设计展示
- SPICE公共代码库:综合资源管理
- 大气蓝灰配色PPT鱼骨图设计技巧
- 绿色风格四原因分析PPT鱼骨图设计
- 恺撒密码:古老而经典的替换加密技术解析
- C语言超市管理系统课程设计详细解析
- 深入分析:黑色因素的PPT鱼骨图应用
- 创新彩色圆点PPT鱼骨图制作与分析
- C语言课程设计:吃逗游戏源码分享
