ORB-SLAM:精确实时的单目SLAM解决方案
需积分: 22 163 浏览量
更新于2024-07-15
收藏 2.01MB PDF 举报
ORB-SLAM是一种高效且精确的单目SLAM(Simultaneous Localization And Mapping,同时定位与建图)系统,特别适合于实时操作和各种环境应用,包括室内和室外,从小范围到大规模场景。该系统的设计考虑了鲁棒性,能够处理快速移动的摄像头图像,并有效地执行闭环检测和重定位。
在相关工作中,ORB-SLAM借鉴并改进了位置识别、地图初始化和单目SLAM等领域的已有成果。位置识别通常通过图像特征匹配来实现,地图初始化则涉及对场景的理解和初步构建,而单目SLAM则需解决仅用单个摄像头进行三维空间定位和建图的挑战。
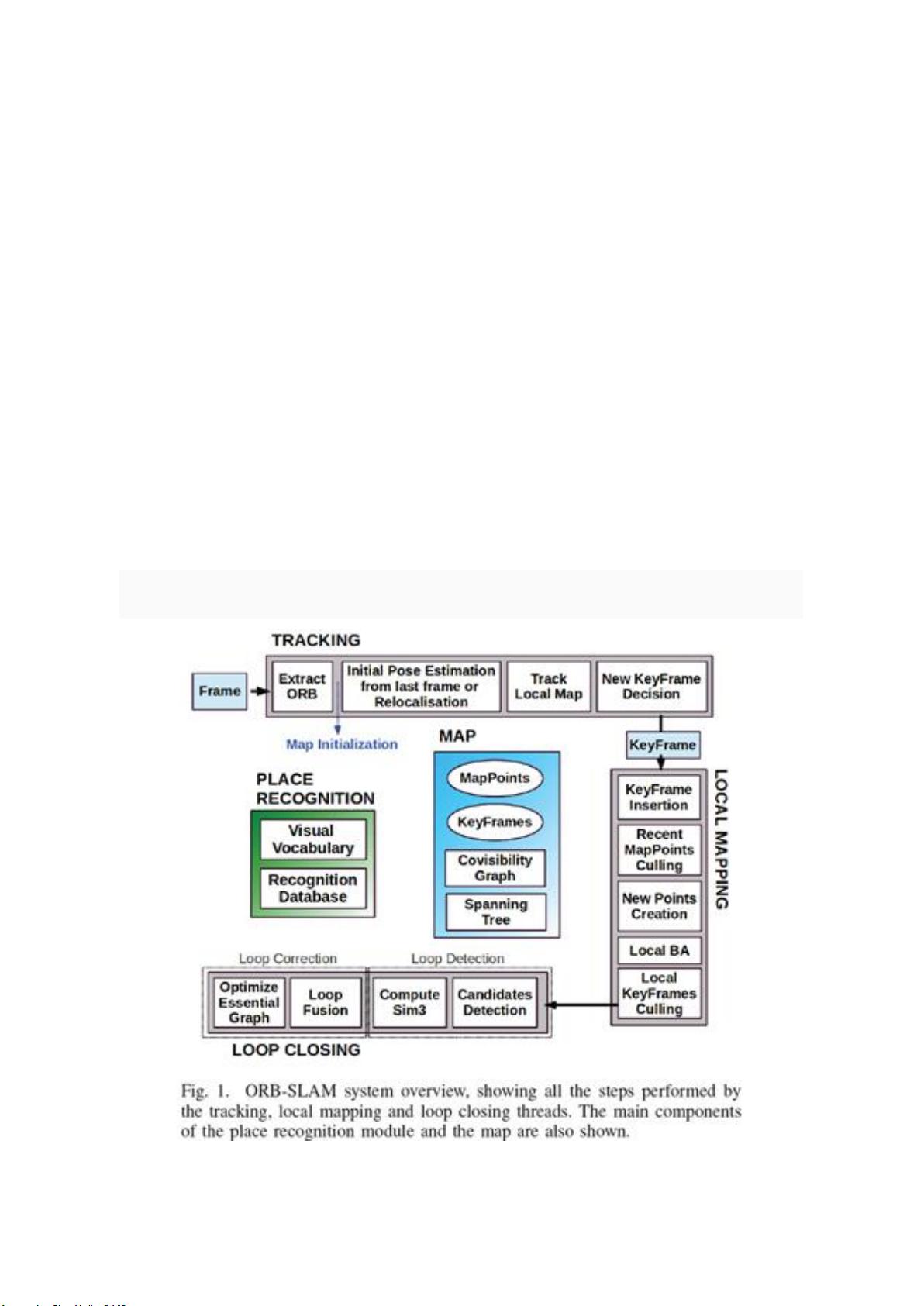
ORB-SLAM的系统架构包含三个主要部分:追踪、局部地图构建和闭环控制。特征选择中,ORB(Oriented FAST and Rotated BRIEF)特征被选用,因其高效且鲁棒。追踪线程负责连续帧间的相机位姿估计,局部地图构建线程则处理新观测数据以扩展地图,闭环控制线程则检测和处理可能的闭环,以修正长期漂移。
在地图表示上,ORB-SLAM使用关键帧和地图点云,这种表示方式既能保持地图的精简,又能在内容变化时持续更新。图像词袋模型用于辅助位置识别,以实现高效的重定位功能。
全自动地图初始化是ORB-SLAM的一大亮点,它能自动从连续的图像流中建立初始地图。追踪过程中,ORB特征被提取,初始位姿估计通过前一帧信息完成,随后进行全局重定位优化以提高精度。局部地图追踪确保了在复杂环境中系统的稳定性,新关键帧的选取则基于一定的准则,如视觉显著性。
局部地图构建涉及到关键帧的插入、地图点云的筛选和更新,以及局部的束集调整,以优化地图结构。闭环控制包含候选回环检测、相似变换计算、回环融合以及本征图像优化等步骤,确保系统能够在检测到回路时及时纠正定位误差。
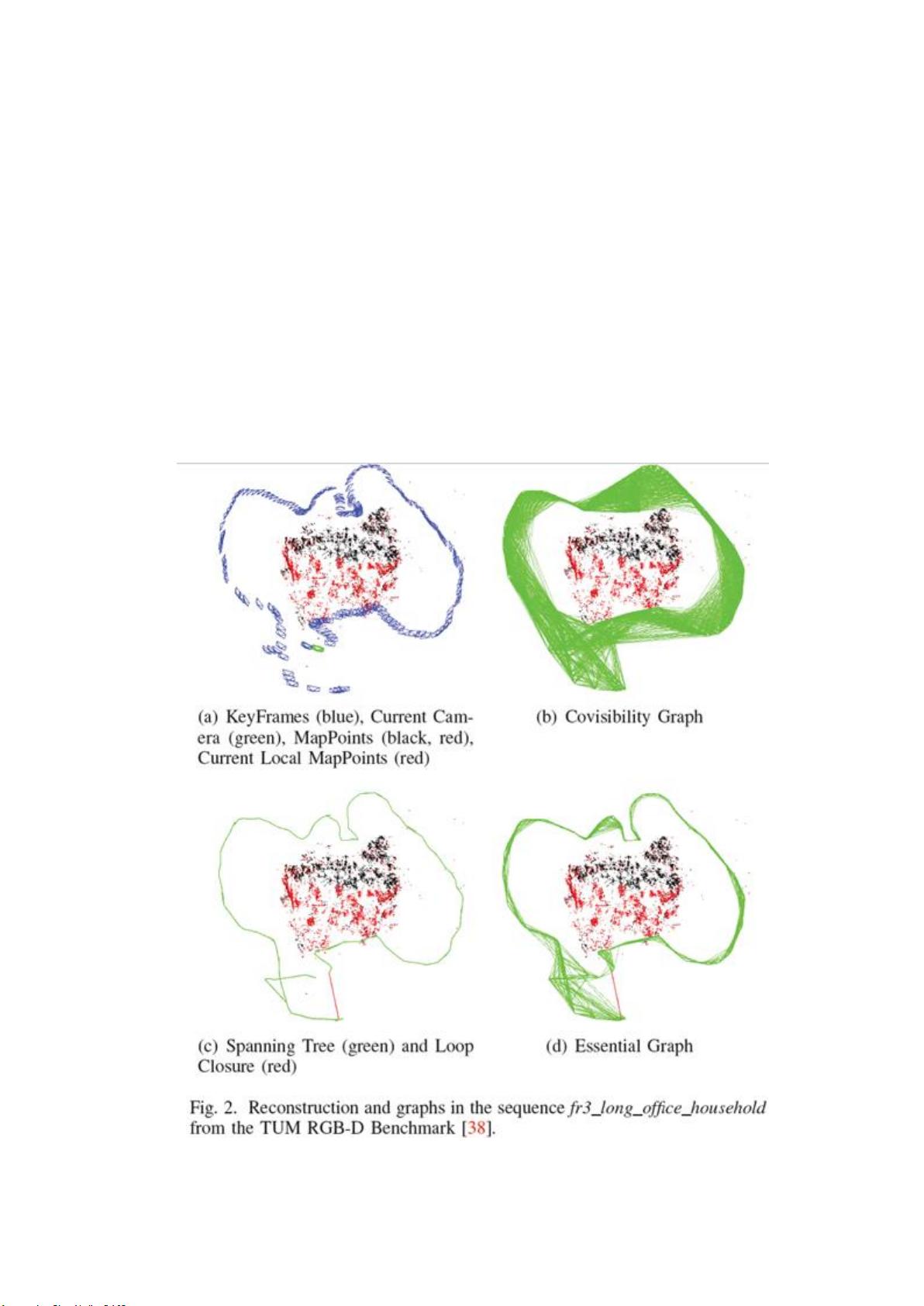
实验部分展示了ORB-SLAM在不同基准测试上的优异性能,比如Newcollege、TUMRGB-D和KITTI数据集,证明了其在定位精度、重定位性能和大场景回环检测中的优势。
总结来说,ORB-SLAM系统是一个综合性的解决方案,它在单目SLAM领域实现了高性能和多功能性,为机器人导航和自主探索提供了强大的工具。尽管如此,它仍然存在改进的空间,例如与稠密/直接方法的比较,以及未来可能的优化和扩展。
8
我们系统设计的中心思想是对这些功能采用相同的特征,构建地图、追踪、位置识别、基
于图像帧率的重定位和闭环回路检测。这使得我们的系统更有效率,没有必要极化特征识别的深
度图,如论文 6,7 里讨论的。我们每张图像的特征提取远少于 33 毫秒,SIFT
(~300ms),SURF(~300ms),A-KAZE(~100ms)。为了获得一般性的位置识别方法,我们需
要特征提取的旋转不变性,而 BRIEF 和 LDB 不具备这样的特性。
我们选择了我们选择了 ORB,它是旋转多尺度 FAST 角点检测具有 256 位特征描述子。他
们计算和匹配的速度非常快,同时对视角具有旋转不变的特性。这样可以在更宽的基准线上匹配
他们,增强了 BA 的精度。我们已经在论文 11 中演示了 ORB 位置识别的性能。本文的方案中也
采用 ORB。
B. 三个线程:追踪、局部地图构建和闭环控制
剩余44页未读,继续阅读
422 浏览量
954 浏览量
289 浏览量
307 浏览量
128 浏览量
422 浏览量
307 浏览量
1467 浏览量
290 浏览量

xkl01
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 普天身份证阅读器新版二次开发包发布
- C# 实现文件的数据库保存与导出操作
- CkEditor增强功能:轻松实现图片上传
- 掌握DLL注入技术:测试工具使用与探索
- 实现带节假日农历功能的jQuery日历选择器
- Spring循环依赖示例:深入理解与Git代码仓库实践
- ABB PLC液压阀门控制程序开发指南
- 揭秘4核旋风密版626象棋引擎的超牛实力
- HTML5实现的经典游戏:小霸王坦克大战源码分享
- 让Visual Studio兼容APM硬件信息的方法
- Kotlin入门:创建我的第一个应用
- Android语音识别技术研究报告与应用分析
- 掌握JavaScript基础:第8版教程源代码解析
- jQuery制作动态侧面浮动图片广告特效教程
- Android PinView仿支付宝密码输入框源码分析
- HTML5 Canvas制作的围住神经猫游戏源码分享
