ORB-SLAM:实时精准单目SLAM系统
需积分: 9 33 浏览量
更新于2024-07-18
收藏 3.91MB PDF 举报
"ORB-SLAM论文介绍了基于特征的单目SLAM系统,该系统在实时性、鲁棒性和准确性上表现出色,适用于各种室内和室外环境。系统能够处理剧烈运动干扰,支持宽基线闭环和重新定位,并具有全自动初始化功能。"
ORB-SLAM(Oriented FAST and Rotated BRIEF)是一种先进的视觉SLAM(Simultaneous Localization And Mapping,即同时定位与建图)系统,其核心是结合了定向的FAST特征检测和旋转BRIEF特征描述子。FAST(Features from Accelerated Segment Test)算法用于快速检测图像中的关键点,它能够在低计算复杂度下找到图像边缘的角点。而BRIEF(Binary Robust Independent Elementary Features)是一种二进制特征描述符,通过比较图像局部像素对的强度差异来生成短而高效的描述符,具有较强的旋转不变性。
ORB-SLAM的独特之处在于,它使用相同的特征执行跟踪、映射、重新定位和闭环检测等所有SLAM任务。这种设计简化了系统结构,提高了效率。系统采用了“适者生存”策略,根据关键点的质量和贡献选择保留哪些点和关键帧,从而构建出紧凑且易于跟踪的地图。地图只会在场景内容发生变化时增长,这使得ORB-SLAM能够实现长期操作,适应环境的变化。
在实际应用中,ORB-SLAM展示了卓越的鲁棒性,即使在复杂和动态的环境中也能保持稳定运行。它能有效处理大范围的相机运动,支持宽基线的闭环,这意味着相机可以环回其之前的路径并自动修正累积的定位误差。此外,ORB-SLAM还包括了自动初始化功能,无需人工干预即可开始SLAM过程。
论文中进行了详尽的评估,使用了27个来自主流数据集的序列进行测试,结果表明ORB-SLAM在与其他最先进的单目SLAM方法相比时,性能达到了前所未有的水平。为了促进研究的进展,作者将ORB-SLAM的源代码开源,为研究社区提供了宝贵的资源。
ORB-SLAM是视觉SLAM领域的一个里程碑,它的高效、鲁棒和全面的功能使其成为广泛应用的首选解决方案,对于机器人导航、自动驾驶和增强现实等领域有着深远的影响。
IEEE TRANSACTIONS ON ROBOTICS 4
closing. The tracking is in charge of localizing the camera
with every frame and deciding when to insert a new keyframe.
We perform first an initial feature matching with the previous
frame and optimize the pose using motion-only BA. If the
tracking is lost (e.g. due to occlusions or abrupt movements),
the place recognition module is used to perform a global
relocalization. Once there is an initial estimation of the camera
pose and feature matchings, a local visible map is retrieved
using the covisibility graph of keyframes that is maintained
by the system, see Fig. 2(a) and Fig. 2(b). Then matches with
the local map points are searched by reprojection, and camera
pose is optimized again with all matches. Finally the tracking
thread decides if a new keyframe is inserted. All the tracking
steps are explained in detail in Section V. The novel procedure
to create an initial map is presented in Section IV.
The local mapping processes new keyframes and performs
local BA to achieve an optimal reconstruction in the sur-
roundings of the camera pose. New correspondences for un-
matched ORB in the new keyframe are searched in connected
keyframes in the covisibility graph to triangulate new points.
Some time after creation, based on the information gathered
during the tracking, an exigent point culling policy is applied
in order to retain only high quality points. The local mapping
is also in charge of culling redundant keyframes. We explain
in detail all local mapping steps in Section VI.
The loop closing searches for loops with every new
keyframe. If a loop is detected, we compute a similarity trans-
formation that informs about the drift accumulated in the loop.
Then both sides of the loop are aligned and duplicated points
are fused. Finally a pose graph optimization over similarity
constraints [6] is performed to achieve global consistency. The
main novelty is that we perform the optimization over the
Essential Graph, a sparser subgraph of the covisibility graph
which is explained in Section III-D. The loop detection and
correction steps are explained in detail in Section VII.
We use the Levenberg-Marquardt algorithm implemented in
g2o [37] to carry out all optimizations. In the Appendix we
describe the error terms, cost functions, and variables involved
in each optimization.
C. Map Points, KeyFrames and their Selection
Each map point p
i
stores:
• Its 3D position X
w,i
in the world coordinate system.
• The viewing direction n
i
, which is the mean unit vector
of all its viewing directions (the rays that join the point
with the optical center of the keyframes that observe it).
• A representative ORB descriptor D
i
, which is the as-
sociated ORB descriptor whose hamming distance is
minimum with respect to all other associated descriptors
in the keyframes in which the point is observed.
• The maximum d
max
and minimum d
min
distances at
which the point can be observed, according to the scale
invariance limits of the ORB features.
Each keyframe K
i
stores:
• The camera pose T
iw
, which is a rigid body transforma-
tion that transforms points from the world to the camera
coordinate system.
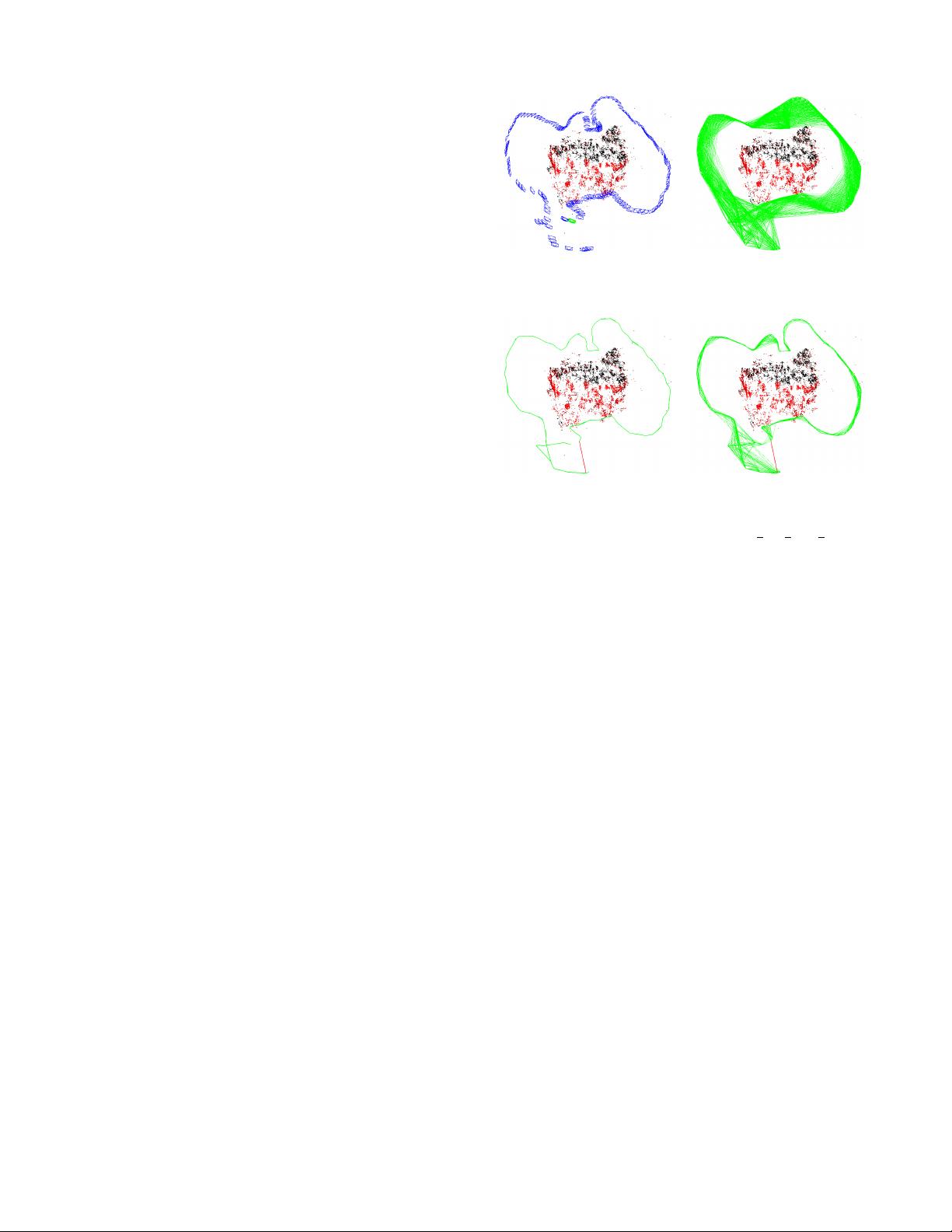
(a) KeyFrames (blue), Current Cam-
era (green), MapPoints (black, red),
Current Local MapPoints (red)
(b) Covisibility Graph
(c) Spanning Tree (green) and Loop
Closure (red)
(d) Essential Graph
Fig. 2. Reconstruction and graphs in the sequence fr3 long office household
from the TUM RGB-D Benchmark [38].
• The camera intrinsics, including focal length and princi-
pal point.
• All the ORB features extracted in the frame, associated
or not to a map point, whose coordinates are undistorted
if a distortion model is provided.
Map points and keyframes are created with a generous pol-
icy, while a later very exigent culling mechanism is in charge
of detecting redundant keyframes and wrongly matched or not
trackable map points. This permits a flexible map expansion
during exploration, which boost tracking robustness under hard
conditions (e.g. rotations, fast movements), while its size is
bounded in continual revisits to the same environment, i.e.
lifelong operation. Additionally our maps contain very few
outliers compared with PTAM, at the expense of containing
less points. Culling procedures of map points and keyframes
are explained in Sections VI-B and VI-E respectively.
D. Covisibility Graph and Essential Graph
Covisibility information between keyframes is very useful in
several tasks of our system, and is represented as an undirected
weighted graph as in [7]. Each node is a keyframe and an edge
between two keyframes exists if they share observations of the
same map points (at least 15), being the weight θ of the edge
the number of common map points.
In order to correct a loop we perform a pose graph opti-
mization [6] that distributes the loop closing error along the
graph. In order not to include all the edges provided by the
covisibility graph, which can be very dense, we propose to
build an Essential Graph that retains all the nodes (keyframes),
but less edges, still preserving a strong network that yields
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2017-01-31 上传
2020-07-28 上传
2016-11-10 上传
2021-03-24 上传
2021-02-07 上传
2023-05-25 上传









