Ubuntu16.04安装ORB_SLAM2详细教程
131 浏览量
更新于2024-08-31
收藏 986KB PDF 举报
"这篇文章主要介绍了在Ubuntu 16.04操作系统上安装和配置ORB_SLAM2的步骤,包括安装必要的工具、库以及运行实例。ORB_SLAM2是一个开源的视觉SLAM(Simultaneous Localization And Mapping)系统,它基于特征ORB(Oriented FAST and Rotated BRIEF)描述符进行定位和建图。本文涵盖了从更新系统到安装相关依赖,直至成功运行ORB_SLAM2实例的全过程。"
1、安装相关工具
在安装ORB_SLAM2之前,首先需要确保系统是最新的,并安装一些基础开发工具。通过`sudo apt-get update`更新软件包列表,然后安装git(用于克隆代码仓库)、cmake(构建工具)和编译器(g++和gcc)。
2、安装Pangolin
Pangolin是ORB_SLAM2的依赖之一,它是一个轻量级的C++图形库,用于快速实现可视化。在安装Pangolin前,需先安装其依赖库`libglew-dev`和`libpython2.7-dev`。之后,从GitHub上克隆Pangolin源码,创建并进入构建目录,使用cmake配置项目,然后通过`make -j`进行编译,最后用`sudo make install`将编译结果安装到系统。
3、安装opencv
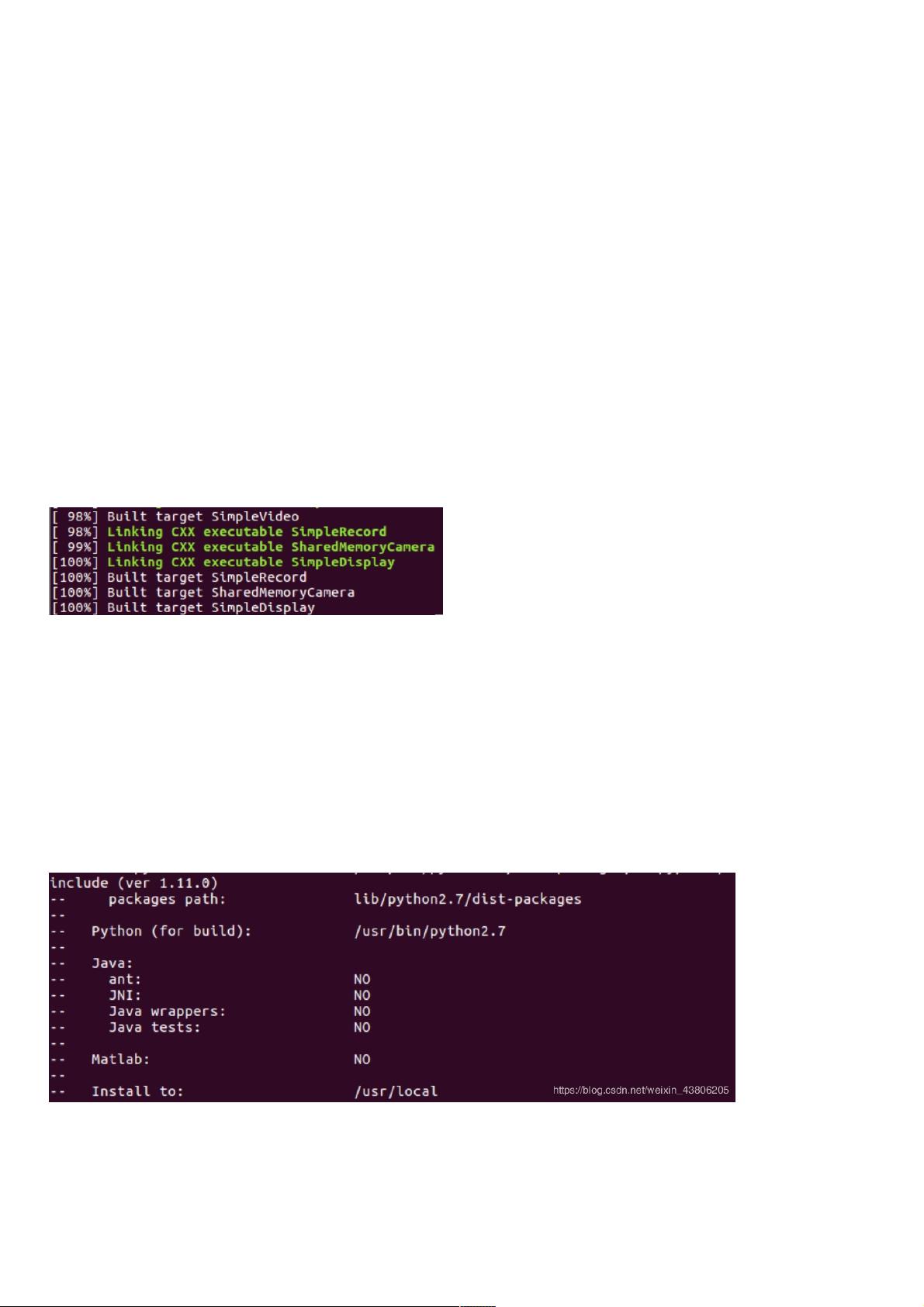
ORB_SLAM2利用了opencv处理图像数据,因此需要安装opencv。首先安装编译opencv所需的依赖项,接着下载opencv的源代码,解压后进入构建目录,使用cmake配置编译选项,指定安装路径为/usr/local。随后,使用`make -j8`进行编译(这里的数字8代表并行编译的线程数,可根据CPU核心数调整),编译完成后通过`sudo make install`安装到系统。最后,需要配置环境变量以使系统能够找到opencv库。
4、安装Eigen3
Eigen3是一个用于线性代数运算的C++模板库,它是ORB_SLAM2中的重要组件。Ubuntu 16.04通常已经预装了Eigen3,如果没有,可以通过`sudo apt-get install libeigen3-dev`来安装。
5、安装ORB-SLAM2
获取ORB_SLAM2的源代码,同样使用git从GitHub上克隆。然后,类似Pangolin和opencv的安装过程,创建构建目录,使用cmake配置项目,编译并安装。配置过程中可能需要指定opencv的安装路径。
6、运行SLAM实例
安装完成后,可以运行ORB_SLAM2的示例。这通常涉及到提供一个视频文件或实时摄像头数据,按照ORB_SLAM2的文档指示进行操作,例如设置参数、启动跟踪、建图等。
7、遇到的问题
在安装和运行过程中可能会遇到各种问题,比如依赖项缺失、版本不兼容、编译错误等。解决这些问题通常需要查阅官方文档、在线论坛或GitHub上的issue页面,根据错误提示进行调试。
8、参考文献
文章提供了参考资料,可能包括ORB_SLAM2的GitHub页面、相关论文和其他教程,帮助读者更深入地理解SLAM技术。
总结来说,安装ORB_SLAM2涉及多个步骤,包括系统更新、安装依赖、编译源代码以及配置环境。通过这个过程,用户将能够搭建一个能够在Ubuntu 16.04上运行的ORB_SLAM2系统,从而进行视觉定位和建图实验。
Ubuntu16.04下下 ORB_SLAM2的安装、配置和实例运行的安装、配置和实例运行
文章目录文章目录1、安装相关工具2、安装Pangolin3、安装opencv4、安装Eigen35、安装ORB-SLAM26、运行SLAM实例7、遇到的问题8、参考文献
1、安装相关工具、安装相关工具
①更新apt
sudo apt-get update
②安装git
sudo apt-get install git
③安装cmake
sudo apt-get install cmake
④安装gcc、g++
sudo apt-get install g++
sudo apt-get install gcc
2、安装、安装Pangolin
①安装依赖项
sudo apt-get install libglew-dev libpython2.7-dev
②下载Pangolin
git clone https://github.com/stevenlovegrove/Pangolin.git
③编译安装
cd Pangolin
mkdir build
cd build
cmake ..
make -j
sudo make install
3、安装、安装opencv
①安装依赖项
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
②下载opencv
wget -O opencv-3.4.1.zip https://github.com/Itseez/opencv/archive/3.4.1.zip
③解压opencv包
unzip opencv-3.4.1.zip
④编译并安装
cd ~/opencv-3.4.1
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=Release –D CMAKE_INSTALL_PREFIX=/usr/local ..
⑤
make -j8
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-05-19 上传
2023-06-28 上传
2023-04-02 上传
2021-10-04 上传
2021-03-05 上传

weixin_38537968
- 粉丝: 6
- 资源: 975
 我的内容管理
展开
我的内容管理
展开







最新资源
- watch-bash:Unix(Linux Mac OS X)监视文件更改为concat或..做某事。 (重击shell脚本)
- helion-rabbitmq-java:这是一个简单的基于 Servlet 的 Java web 应用程序,它使用 RabbitMQ
- springAngular:Todos los archivos del curso de springAngular
- 电子功用-用于升级电子设备的系统的方法
- online_farmers_market
- export-pdf
- VirtualChair-开源
- json_api_transform
- linux-Termux一键安装Linux脚本.zip
- 投资组合:琼·克拉克的单页个人投资组合页面
- 在设计器中使用qml自定义Quick模块(使用qml源码) 测试源码
- restaurant-template:为机器人餐厅模板准备的后端
- 电子功用-变电站温湿度在线监测预警系统
- InterfaceComponent:这个界面组件提供了一个滑动标签界面,任何人都可以使用它轻松地为他们的应用程序提供多片段活动
- kasparov:Kasparov是一个Web面板,用于管理远程服务器并在其上执行一些常见任务,专为希望执行一些基本任务(例如设置Web服务器)的非技术人员设计
- 51单片机不同数据类型的延时函数控制LED灯闪烁源代码
