
4
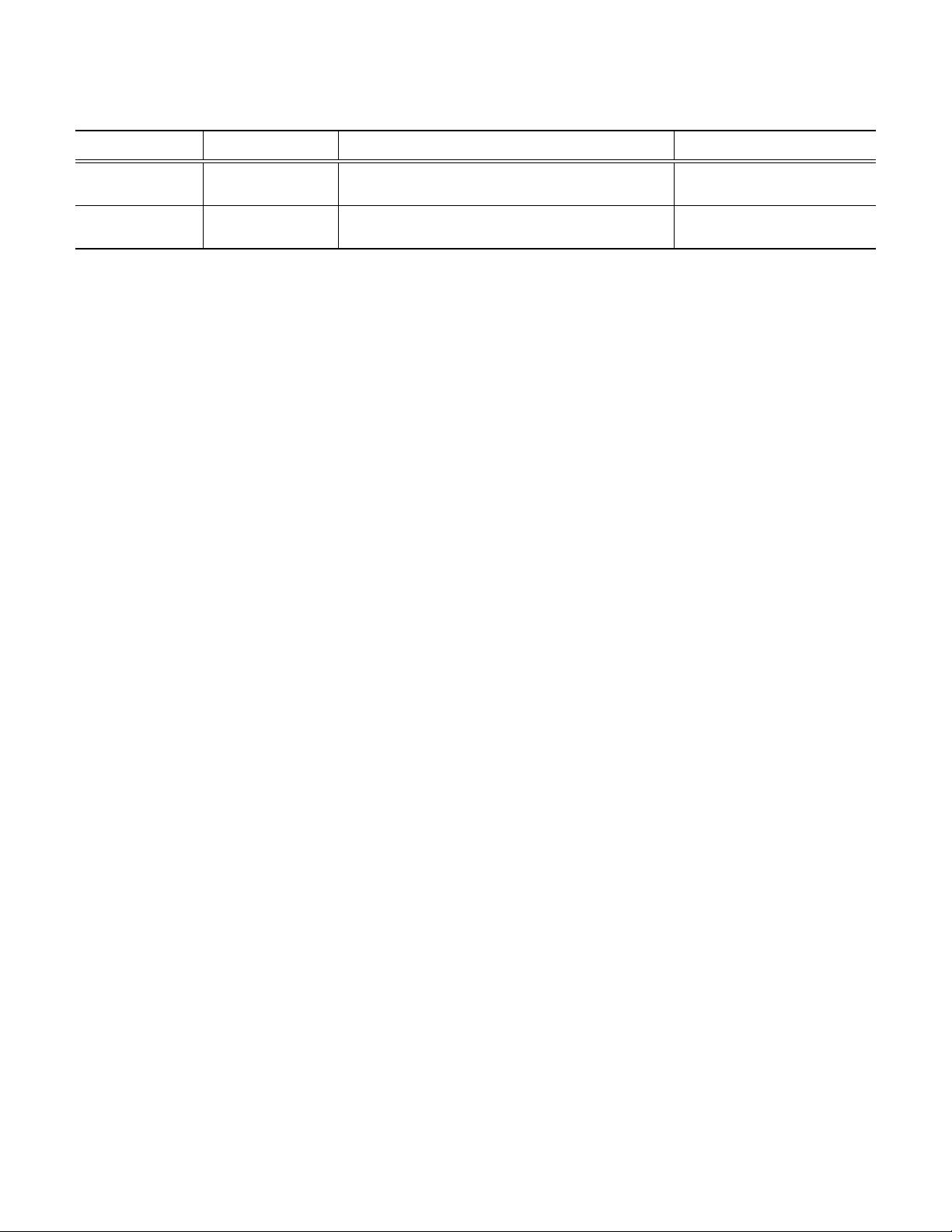
TABLE 1
Average PSNR(dB) results of different methods with noise levels 15, 25 and 50 on the widely-used Set12 and BSD68 [3], [44], [49] datasets. The
best and second best results are highlighted in red and blue colors, respectively.
Datasets
Noise
BM3D WNNM DnCNN
N
3
Net
NLRN RNAN FOCNet IRCNN FFDNet DRUNet
Level
15 32.37 32.70 32.86 – 33.16 – 33.07 32.77 32.75 33.25
Set12 25 29.97 30.28 30.44 30.55 30.80 – 30.73 30.38 30.43 30.94
50 26.72 27.05 27.18 27.43 27.64 27.70 27.68 27.14 27.32 27.90
15 31.08 31.37 31.73 – 31.88 – 31.83 31.63 31.63 31.91
BSD68 25 28.57 28.83 29.23 29.30 29.41 – 29.38 29.15 29.19 29.48
50 25.60 25.87 26.23 26.39 26.47 26.48 26.50 26.19 26.29 26.59
design for better restoration. However, these methods learn
a separate model for each noise level. Perhaps the most
suitable denoiser for plug-and-play IR is FFDNet [18] which
can handle a wide range of noise levels by taking the
noise level map as input. Nevertheless, FFDNet only has
a comparable performance to DnCNN and IRCNN, thus
lacking effectiveness to boost the performance of plug-and-
play IR. For this reason, we propose to improve FFDNet
by taking advantage of the widely-used U-Net [20] and
ResNet [19] for architecture design.
3.1 Denoising Network Architecture
It is well-known that U-Net [20] is effective and efficient for
image-to-image translation, while ResNet [19] is superior
in increasing the modeling capacity by stacking multiple
residual blocks. Following FFDNet [18] that takes the noise
level map as input, the proposed denoiser, namely DRUNet,
further integrates residual blocks into U-Net for effective
denoiser prior modeling. Note that this work focuses on
providing a flexible and powerful pre-trained denoiser to
benefit existing plug-and-play IR methods rather than de-
signing new denoising network architecture. Actually, the
similar idea of combining U-Net and ResNet can also be
found in other works such as [61], [62].
The architecture of DRUNet is illustrated in Fig. 1. Like
FFDNet, DRUNet has the ability to handle various noise
levels via a single model. The backbone of DRUNet is
U-Net which consists of four scales. Each scale has an
identity skip connection between 2 × 2 strided convolution
(SConv) downscaling and 2 × 2 transposed convolution
(TConv) upscaling operations. The number of channels in
each layer from the first scale to the fourth scale are 64,
128, 256 and 512, respectively. Four successive residual
blocks are adopted in the downscaling and upscaling of
each scale. Inspired by the network architecture design for
super-resolution in [63], no activation function is followed
by the first and the last convolutional (Conv) layers, as well
as SConv and TConv layers. In addition, each residual block
only contains one ReLU activation function.
It is worth noting that the proposed DRUNet is bias-
free, which means no bias is used in all the Conv, SConv
and TConv layers. The reason is two-fold. First, bias-free
network with ReLU activation and identity skip connection
naturally enforces scaling invariance property of many im-
age restoration tasks, i.e., f (ax) = af(x) holds true for any
scalar a ≥ 0 (please refer to [64] for more details). Second,
we have empirically observed that, for the network with
bias, the magnitude of bias would be much larger than that
of filters, which in turn may harm the generalizability.
3.2 Training Details
It is well known that CNN benefits from the availability of
large-scale training data. To enrich the denoiser prior for
plug-and-play IR, instead of training on a small dataset that
includes 400 Berkeley segmentation dataset (BSD) images
of size 180×180 [9], we construct a large dataset consisting
of 400 BSD images, 4,744 images of Waterloo Exploration
Database [65], 900 images from DIV2K dataset [66], and
2,750 images from Flick2K dataset [63]. Because such a
dataset covers a larger image space, the learned model can
slightly improve the PSNR results on BSD68 dataset [3]
while having an obvious PSNR gain on testing datasets from
a different domain.
As a common setting for Gaussian denoising, the noisy
counterpart y of clean image x is obtained by adding
AWGN with noise level σ. Correspondingly, the noise level
map is a uniform map filled with σ and has the same spatial
size as noisy image. To handle a wide range of noise levels,
the noise level σ is randomly chosen from [0, 50] during
training. Note that the noisy images are not clipped into the
range of [0, 255]. The reason is that the clipping operation
would change the distribution of the noise, which in turn
will give rise to inaccurate solution for plug-and-play IR.
The network parameters are optimized by minimizing the
L1 loss rather than L2 loss between the denoised image and
its ground-truth with Adam algorithm [67]. Although there
is no direct evidence on which loss would result in better
performance, it is widely acknowledged that L1 loss is more
robust than L2 loss in handling outliers [68]. Regarding
to denoising, outliers may occur during the sampling of
AWGN. In this sense, L1 loss tends to be more stable than
L2 loss for denoising network training. The learning rate
starts from 1e-4 and then decreases by half every 100,000
iterations and finally ends once it is smaller than 5e-7. In
each iteration during training, 16 patches with patch size
of 128×128 were randomly sampled from the training data.
We separately learn a denoiser model for grayscale image
and color image. It takes about four days to train the model
with PyTorch and an Nvidia Titan Xp GPU.
3.3 Denoising Results
3.3.1 Grayscale Image Denoising
For grayscale image denoising, we compared the proposed
DRUNet denoiser with several state-of-the-art denoising
methods, including two representative model-based meth-
ods (i.e., BM3D [23] and WNNM [10]), five CNN-based
methods which separately learn a single model for each
noise level (i.e., DnCNN [44], N
3
Net [60], NLRN [59],
剩余15页未读,继续阅读

Xhinking
- 粉丝: 29
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- JSP+SSM科研管理系统响应式网站设计案例
- 推荐一款超级好用的嵌入式串口调试工具
- PHP域名多维查询平台:高效精准的域名搜索工具
- Citypersons目标检测数据集:Yolo格式下载指南
- 掌握MySQL面试必备:程序员面试题解析集锦
- C++软件开发培训:核心技术资料深度解读
- SmartSoftHelp二维码工具:生成与解析条形码
- Android Spinner控件自定义字体大小的方法
- Ubuntu Server on Orangepi3 LTS 官方镜像发布
- CP2102 USB驱动程序的安装与更新指南
- ST-link固件升级指南:轻松更新程序步骤
- Java实现的质量管理系统Demo功能分析与操作
- Everything高效文件搜索工具:快速精确定位文件
- 基于B/S架构的酒店预订系统开发实践
- RF_Setting(E22-E90(SL)) V1.0中性版功能解析
- 高效转换M3U8到MP4:免费下载工具发布
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


