基于判别性度量学习的高光谱图像异常检测方法
需积分: 9 162 浏览量
更新于2024-09-07
收藏 2.16MB PDF 举报
本文主要探讨了一种基于区分性度量学习的异常检测方法,针对高光谱图像中的异常检测问题。传统的基于马氏距离的异常检测方法依赖于背景统计信息来构建检测指标,但存在两个主要挑战:首先,对背景数据的高斯分布假设可能并不适用,这可能导致检测性能下降;其次,常规背景协方差矩阵容易受到异常像素的污染,从而影响异常检测的准确性。
该论文提出了一种新颖的策略,通过有效利用区分性信息来增强异常像素与背景像素之间的分离度,从而提高异常检测的鲁棒性。这种方法的关键步骤包括两部分:首先,引入流形特征,将像素划分为潜在的异常区域和潜在的背景区域,这一过程称为区分性信息学习。这种划分有助于区分那些在光谱上显著不同的异常目标。
接着,作者采用一种度量学习方法,旨在学习一个更为稳健的异常程度度量,这个度量能够更准确地衡量每个像素属于异常类的概率,减少由背景噪声或异常样本对异常检测结果的影响。这种方法不仅考虑了全局背景统计,还结合了局部结构信息,提高了异常检测的准确性和稳定性。
通过对三个不同高光谱数据集的实验验证,研究结果表明,这种基于区分性度量学习的异常检测方法在性能上优于现有的传统方法。它在异常检测的敏感性和精确性方面都表现出优势,尤其是在处理那些光谱特性显著不同于背景的数据时,其效果尤为显著。
本文提供了一个有效的解决方案,通过结合流形特征和度量学习技术,有效地解决了高光谱图像异常检测中的背景假设问题和异常污染问题,对于提高遥感领域中的目标识别和异常事件检测具有重要意义。
6846 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 52, NO. 11, NOVEMBER 2014
be imposed to be zero for those x
j
that are not among them;
second, the rows of the weight matrix should be summed to
be one. By the two constraints, the reconstruction errors are
invariant to rotations, rescalings, and translations of that data
pixel and its neighboring pixels. From (1), the invariance to
rotations and rescalings follows immediately; the invariance to
translations is enforced by the sum-to-one constraint on the
rows of the weight matrix. The optimal ω
(i)
j
to the cost error
then becomes a constrained optimization problem. Detailed
information on the solution is included in Appendix I.
Suppose that the data set also lies on or near a smooth
nonlinear manifold of dimensionality d(d L). There would
then be a proper linear mapping, which employs translation, ro-
tation, and rescaling, to map the high-dimensional coordinates
of each neighborhood into the global internal coordinates on
the manifold [29]. These corresponding reconstruction weights
should directly reflect the intrinsic geometric properties of the
data set, so that it would not be variant to these transforma-
tions. In other words, each locally linear patch from the high-
dimensional feature space can be placed in a low-dimensional
embedding space, where the same weight ω
ij
that reconstructs
the ith pixel in the L dimensions should also reconstruct its
embedded manifold coordinates in d dimensions.
The key to the low-dimensional embedding is then a neigh-
borhood preserving mapping. Therefore, each pixel x
i
is
mapped into a low-dimensional vector z
i
to minimize the
embedding cost function:
ε(z)=
N
i=1
z
i
−
x
j
∈H
i
ω
ij
z
j
2
. (3)
The aforementioned cost function is much like the previous
one, which is also computed from the locally linear reconstruc-
tion errors. The weight ω
ij
is fixed this time, and the embedding
cost in the aforementioned equation constitutes a minimization
problem. The solution actually becomes a sparse eigenvec-
tor problem. The final z
i
constitutes the bottom d nonzero
eigenvectors, which constitute an ordered set of orthogonal
coordinates centered on the origin. Further details are listed in
Appendix II.
In the aforementioned way, each pixel’s reconstruction
weight is retrieved by only its local neighborhood pixels. In
other words, each patch is independent of the other patches
in the mapping into the low-dimensional feature space. By the
weight matrix, however, a global operation coupling all of the
pixels in the connected components of the graph of the matrix
is constructed, and an N
∗
N eigensolver is computed to get the
embedding coordinates. In addition, the bottom eigenvectors
from (3) are figured out one at a time. In this way, all of the local
patch information is exploited to discover the global structure,
as all of the pixels’ patches are overlapping.
We use the reconstruction error in (3) as the separation rule,
with adaptive thresholding [2], which is quick and increases the
flexibility, so as not to omit the probable anomalies. Further-
more, the anomalies have a low probability of occurrence in the
image, and the percentage of target pixels versus background
is under 1%. In most cases, we can safely use an empirical
probability of 0.05% for separating the most probable anomaly
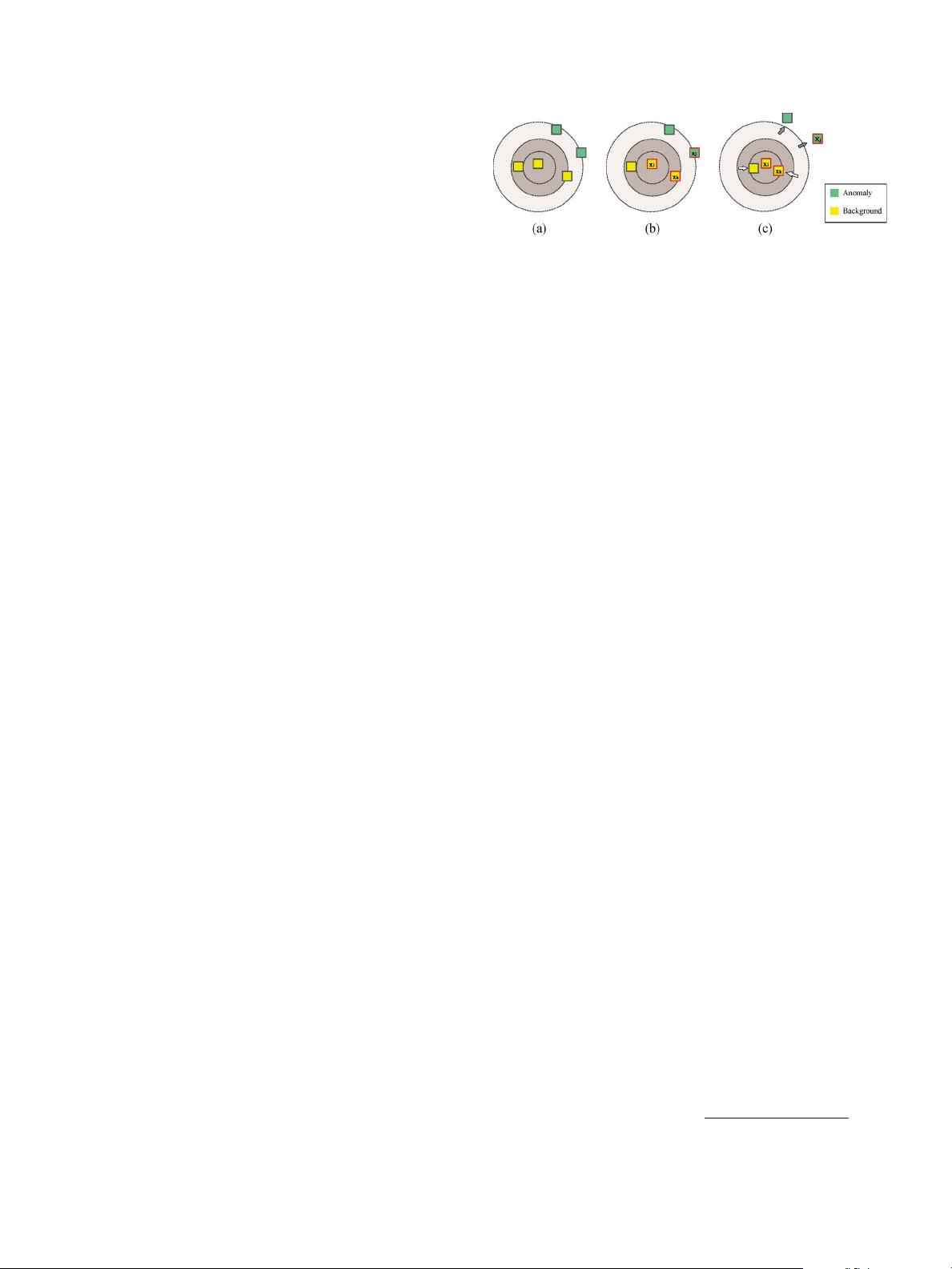
Fig. 2. Schematic illustration of the proposed method. The purpose is to
enlarge the separability between anomalies and background pixels, while the
distance of background pixels is reduced. (A) Original sample. (B) Triplewise
discriminative information labeling. (C) Projecting by anomaly metric.
pixels. The adaptive thresholding method then calculates the
threshold for segmenting anomalies by setting an accumulat-
ing distribution probability percentage of 99.95% from the
histogram of the detection results. The determined probable
anomaly areas are not used directly as the detection results but
as the discriminative label information.
We define two sets named A (anomaly) and B (background)
to denote these labels. For each anomaly pixel, two of its
surrounding nearest neighbor background pixels are picked up
to construct the two data sets. The two background pixels refer
to those among the observed anomaly pixel’s neighbors but are
also the ones with low reconstruction errors to be classified
as background pixels. Therefore, the number of B is twice
of that of A(N
B
=2N
A
). We can then define the dissimilar
data set D and the similar data set S from these two sets:
D = {(x
i
, x
j
)}, x
i
, x
j
=1,...,N
A
, where x
i
belongs to B
and x
j
belongs to A, with x
i
being the nearest neighbor of
x
j
in B; S = {(x
i
, x
k
)}, x
i
, x
k
=1,...,N
B
, where x
i
and
x
k
belong to B. Furthermore, a guard interval is set between
the labeled anomaly pixels and the labeled background pixels,
excluding the labeled background pixels with the largest 10%
reconstruction errors, so as to make S and D immune to weak
anomalies on the boundary of anomaly and background.
III. A
NOMALY METRIC LEARNING
AND
ANOMALY DETECTION
The main idea behind our method can be represented as
follows. From Fig. 2(a), the anomaly pixels appear to be not
particularly differentiable from the background ones. Then, in
Fig. 2(b), the pixels are labeled as probable anomaly and prob-
able background by means of the manifold reconstruction error.
Finally, with the aim of improving the separability between
anomalies and backgrounds, all of the samples are projected
by a proper anomaly metric. The resulting distribution is shown
in Fig. 2(c), revealing that the background samples are more
compact, while the distances between the backgrounds and
anomalies are enlarged.
The key then becomes the construction of a robust anomaly
metric from the label information. A Mahalanobis-like distance
metric is employed. Its expression is
dis
M
(x
i
, x
j
)=x
i
−x
j
M
=
(x
i
−x
j
)
T
M(x
i
−x
j
). (4)
In order to figure out M, an optimal function should be
defined. Some distance constraints are also introduced. In de-
tail, the optimal function comprises two parts: The first part
剩余13页未读,继续阅读
2020-12-05 上传
2021-02-21 上传
2018-05-22 上传
2014-12-12 上传
2021-03-06 上传
2021-02-21 上传
2021-02-10 上传
2015-09-06 上传
2017-10-19 上传

mning_master0
- 粉丝: 1
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
