利用Raspberry Pi实现陀螺仪通信与读取数据
84 浏览量
更新于2024-08-03
收藏 443KB PDF 举报
陀螺仪的使用树莓派教程深入解析
在本文中,我们将探讨如何在树莓派上利用Python3进行陀螺仪的连接与数据读取,以便于实现精确的姿态检测。首先,我们了解了陀螺仪的基本概念,它是一种测量设备,用于测量物体在三个轴向上的角速度变化,对于运动跟踪、航向控制和姿态估计等领域具有重要意义。
文章开始介绍了一个针对树莓派2B(实际应用可能需要4B版本)的接线图,尽管文中提到的是2B,但需要注意的是,读者需要根据自己的树莓派型号调整相应的I2C引脚。接下来,作者引入了所需的Python库smbus,这个库用于与I2C设备通信,如陀螺仪,通过SMBus接口实现数据交换。
重点部分的代码展示了如何通过smbus模块与陀螺仪进行通信。首先,通过`power_mgmt_1`和`power_mgmt_2`寄存器地址设置电源管理,确保设备处于可被读写的模式。`read_byte`和`read_word`函数分别用于单字节和双字节的数据读取,`read_word_2c`则对读取到的数据进行处理,修正溢出情况。
在主循环中,代码持续监测陀螺仪的输出,`gyro_xout`, `gyro_yout`, 和 `gyro_zout`变量存储了在X、Y和Z轴上的角速度。通过调用`math.atan2`和`math.degrees`函数,计算出设备在各个方向上的旋转角度,如Y旋转角度`get_y_rotation`和X旋转角度`get_x_rotation`。
值得注意的是,这里的通信协议涉及到主设备和从设备之间的同步,包括开始信号的发送(设备地址和操作类型),数据传输以及结束信号的确认。在读取数据前,主设备会发送一个开始信号,然后根据从设备的应答进行下一次操作,这一过程体现了I2C通信的基本步骤。
这篇文章提供了一套详细的树莓派与陀螺仪配合使用的方法,涉及硬件连接、Python编程以及基本的I2C通信技巧。通过这些步骤,用户可以利用树莓派来采集和处理来自陀螺仪的运动数据,这对于构建各种需要精确运动跟踪的应用非常有用,例如机器人导航、运动传感器分析等。
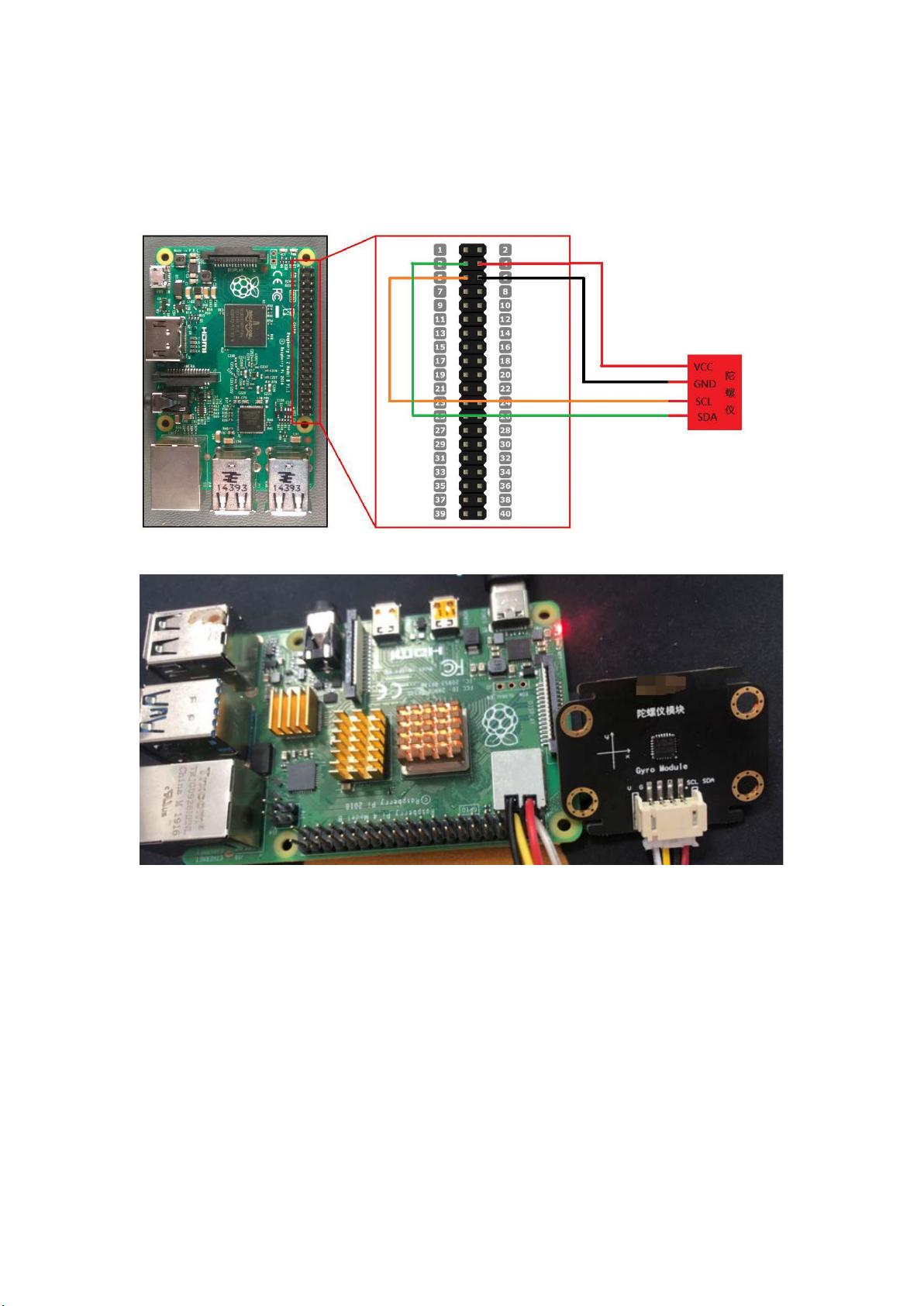
陀螺仪:
接线图(图中为
2b
,实际上用的是
4b
,请用相对应的引脚进行接线):
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-08-01 上传
2024-04-07 上传
2024-02-27 上传
2024-03-11 上传
2024-03-26 上传
2024-01-23 上传

竹影卿心
- 粉丝: 91
- 资源: 29
 我的内容管理
展开
我的内容管理
展开







最新资源
- Study-Circle:这个跨平台的应用程序是使用Flutter制作的,它可能会起到连接社会学习和共同成长的作用
- 一个简易的智能聊天机器人系统.zip
- MiniChickenFolkloric:TCC-UFAM 2020
- matlab心线代码-Multi-Agent-Navigation:多个代理的免费导航
- Whereby-crx插件
- Windows-NT-Native-API.zip_Windows编程_C/C++_
- the-white-rabbit:White Rabbit是基于Kotlin协程的异步RabbitMQ(AMQP)客户端
- 2Ring Extension for Cisco Finesse v4.1.1-crx插件
- 下一个示例会计笔记本
- Design_Park.rar_CAD_Windows_Unix_
- 瑞金医院MMC人工智能辅助构建知识图谱大赛.zip
- skillfactory
- 课程设计之基于HTML+CSS的网页设计.rar
- jokeapp:Spring5Framwork开玩笑的应用程序
- Monster Cards-crx插件
- 完全以SwiftUI编写的带有滑动手势的入门/滑动器。-Swift开发
