"工业机器人轨迹规划与控制:挑战与应对"
版权申诉
82 浏览量
更新于2024-03-04
收藏 2.76MB DOCX 举报
工业机器人的轨迹规划和控制是现代制造业中至关重要的一部分。工业机器人操作臂被广泛应用于生产线上的各种任务,如抓取、放置、焊接、切削和喷涂等,以实现快速、精确和高质量的生产。在这些任务中,机器人操作臂的末端执行器必须在工作空间中移动,执行特定路径或轨迹。因此,轨迹规划和控制对于确保机器人在生产过程中能够按照预定的轨迹运动至关重要。
在工业机器人的轨迹规划中,末端执行器的速度、加速度、轨迹精度等多种限制都需要被考虑进去,并且需要在保持生产效率的同时确保机器人运动的稳定性和精度。如果这些限制没有得到充分考虑,可能会导致轨迹超调、末端操作器偏离给定轨迹、过度的速度波动等问题,从而影响生产质量和效率。
目前已经提出了许多工业机器人轨迹规划的算法,从笛卡尔轨迹规划到时间最优轨迹规划。然而,由于现有的技术经常需要对机构硬件进行重新配置,并且很多方法只考虑到一种约束而忽视其他因素,因此工业系统往往无法适应这些方法。
在实际工业生产中,为了解决这些问题,需要更加智能和灵活的轨迹规划和控制方法。一种可行的解决方案是结合先进的传感技术和智能算法,实现实时监测和调整机器人运动轨迹的能力。这样一来,机器人可以根据实际生产环境的变化情况进行轨迹实时调整,从而避免出现轨迹超调、末端偏离、速度波动等问题,确保生产过程的稳定性和高效性。
此外,工业机器人的轨迹规划和控制还需要考虑到人机协作的需求。随着人工智能和机器人技术的不断发展,越来越多的场景需要工业机器人与人类共同工作,例如在装配线上协助人员进行装配和搬运等任务。因此,工业机器人的轨迹规划和控制还需要考虑到人机协作的安全性和高效性,以确保机器人与人类能够在同一工作空间内安全、高效地合作。
综上所述,工业机器人的轨迹规划和控制是现代制造业中一个至关重要的课题。为了确保生产过程的稳定性和高效性,需要不断研发和创新智能化、灵活化的轨迹规划和控制方法,并将其应用于实际生产中,以推动制造业的数字化、智能化和自动化发展。

标最好的利用节点加速度调节能力,这样就要避免饱和。
2.3 问题描述
在本项任务中,我们考虑以下三个在实际工业机器人应
用中适用的主要问题。
, , 是末端操作器的速度,额定的速度和最大切向
v
v
v max
r
r
速度(在弧形拐角处)。e 和 是轨迹误差和容差度。限制
(5)描述了节点加速度的线性区域,在此区域中动力学方
程(3)适用。超出这个限定的话动力学方程(4)适用。限
制(6)指定了当末端操作器沿直线运动或通过拐角时的速
度限制。节点的额定速度
,
RPM
是
r
节点的额定转速(转/分钟), 是减速装置系数。然后,
N
G
额定速度
,L 是连杆长度。在轨迹拐角处的切向速
度更难保持恒定的向心加速度,它也可以在理论上就像在
中描述的一样被决定。
3.轨迹规划
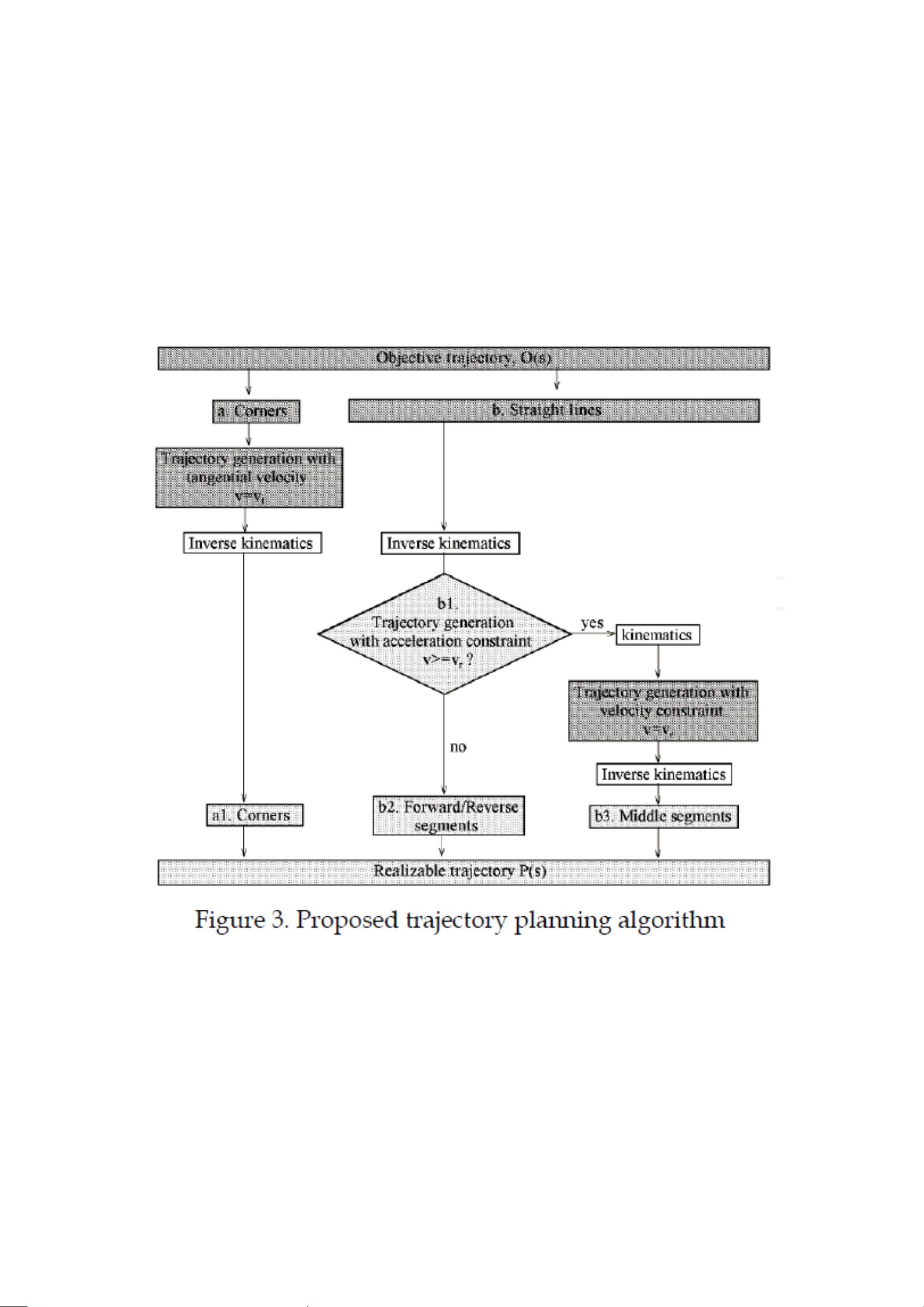
3.1 算法
我们提出的轨迹规划算法在下图三中说明。
目标轨迹 被请求所指定,他被划分为 a)转弯处的
O
(s)
环节和 b)直线环节。在笛卡尔空间用指定的切向速度
剩余31页未读,继续阅读
2022-06-24 上传
2022-07-01 上传
2022-06-30 上传
2023-07-12 上传
2019-09-05 上传
2022-11-05 上传

春哥111
- 粉丝: 1w+
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







