RS-LiDAR-16用户手册:3D激光雷达技术详解
版权申诉
42 浏览量
更新于2024-07-18
收藏 3.45MB PDF 举报
"RS-LiDAR-16用户手册.pdf"
RS-LiDAR-16是一款高性能的16通道激光雷达传感器,主要用于自动驾驶、机器人导航、无人机避障等领域。用户手册详细介绍了该产品的使用、配置和维护,以及相关的软件支持。
1. 修订历史:手册经过多次修订和完善,内容不断更新以适应硬件和软件的升级。从1.0版本到4.3版本,涵盖了硬件改进、功能增强、协议更新和故障排除等多个方面。
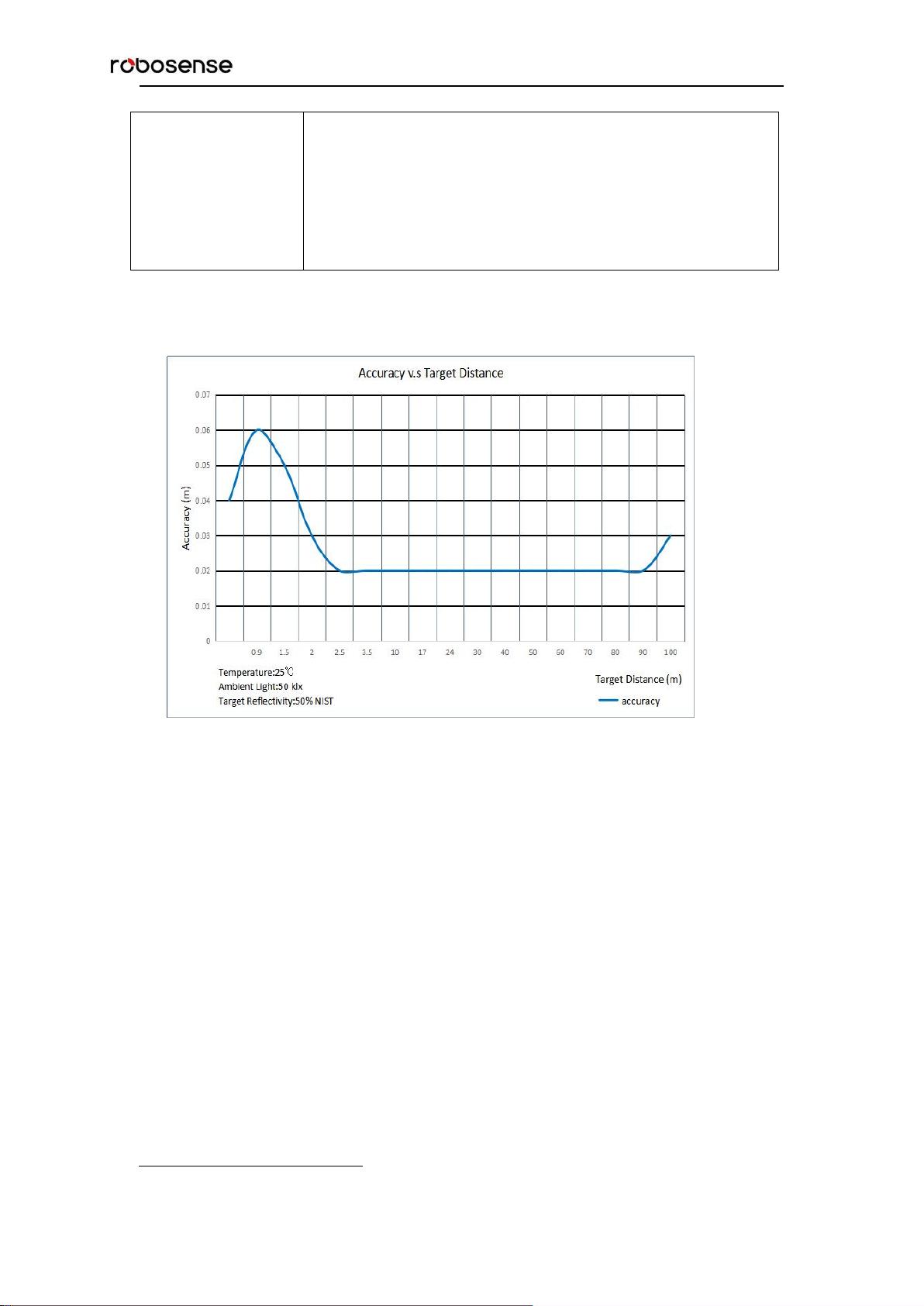
2. 硬件特性:RS-LiDAR-16具有150米的测距能力,并在后续版本中增加了对LiDAR坐标原点物理位置的说明,以帮助用户更好地理解数据输出。此外,还进行了硬件内容的更新,例如增加了激光通道与垂直角度的描述,以及底板固件在线升级功能。
3. 协议和数据格式:手册中详细解释了RS-LiDAR-16的数据传输协议,如DIFOP包协议和UCWP包数据格式结构,以及在不同版本中的调整。同时,还涉及了坐标系的定义、水平角分辨率的描述以及故障诊断的协议说明。
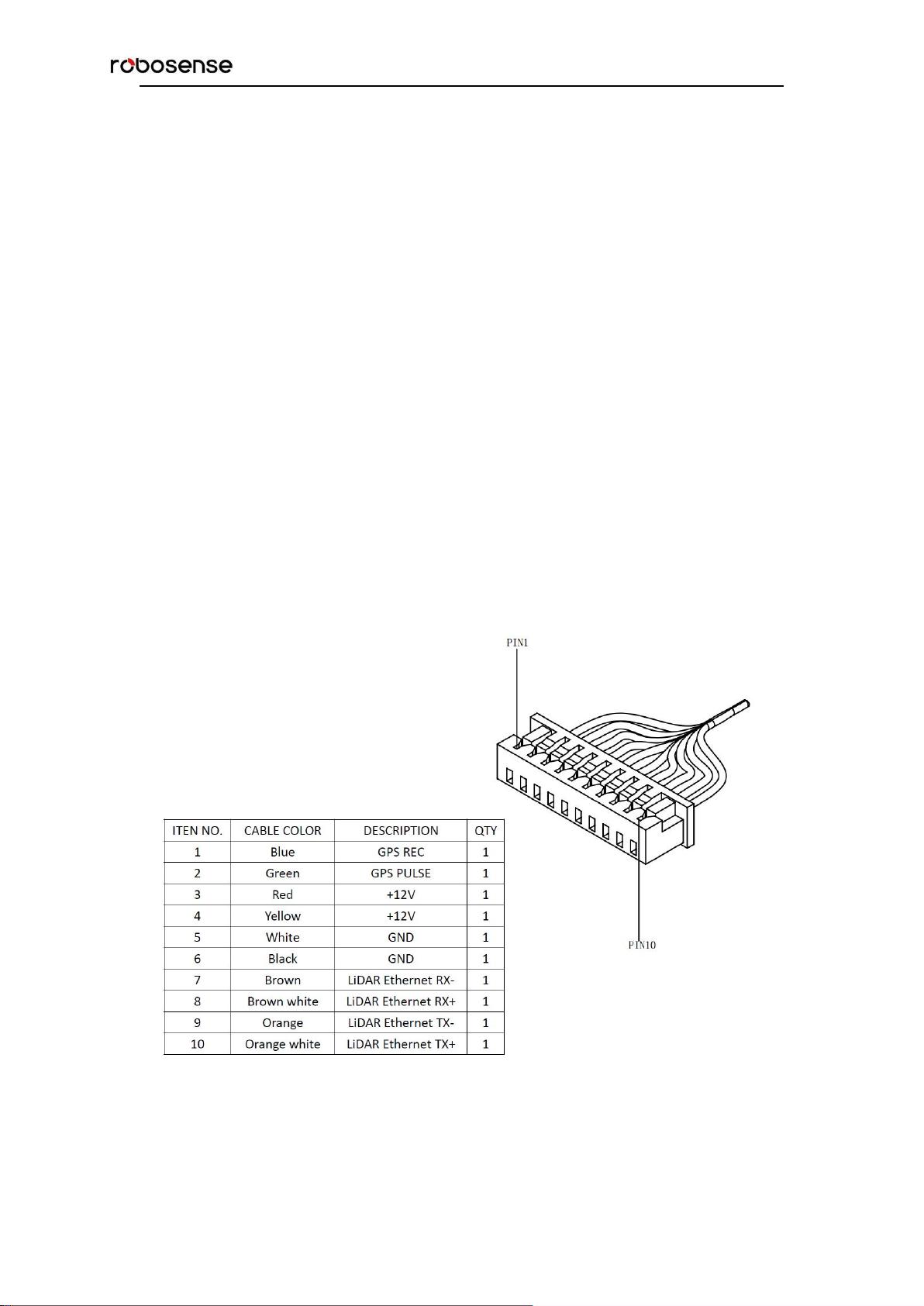
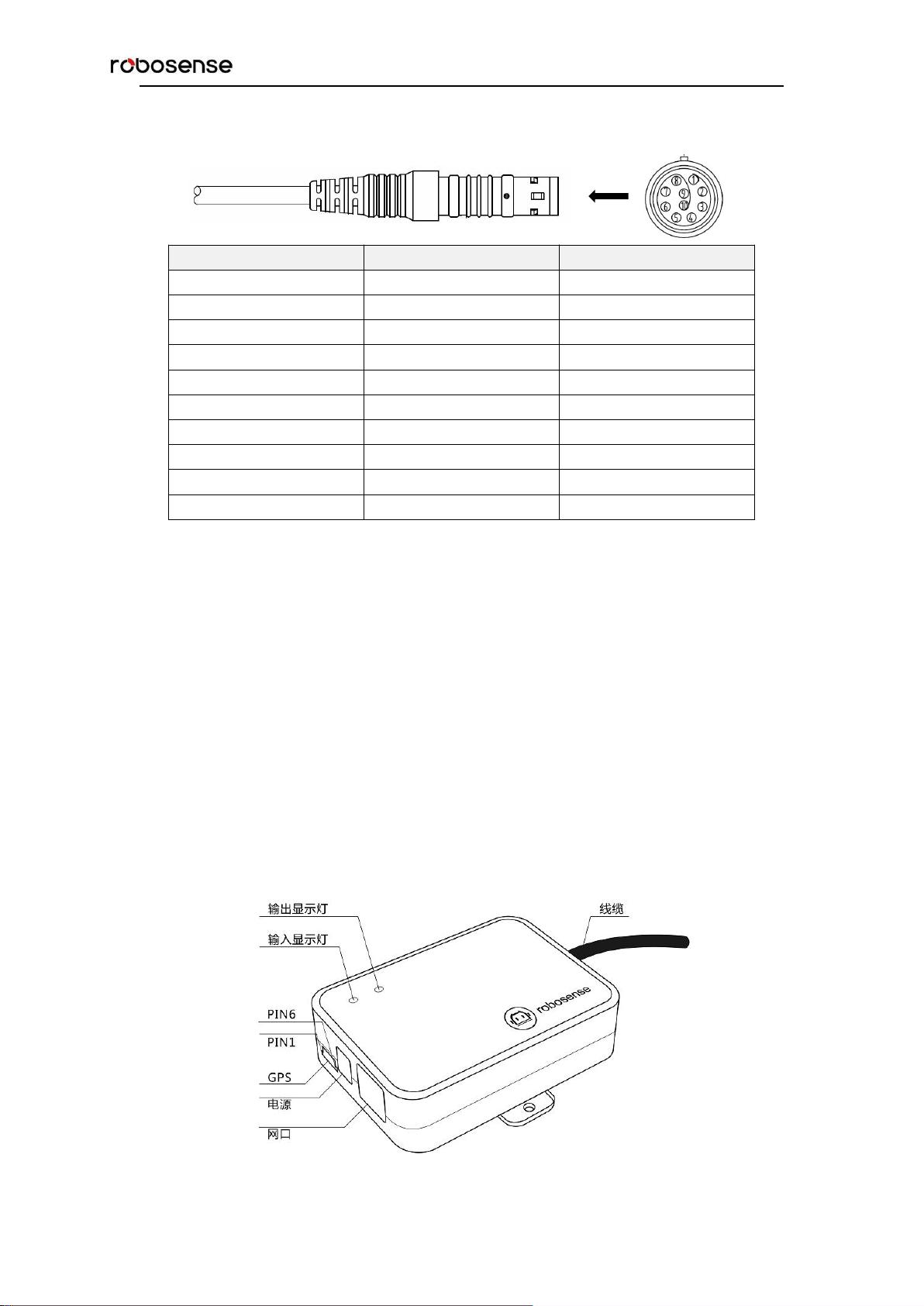
4. 软件支持:手册包括了RSVIEW软件的使用说明,提供了设备信息配置方法,还增加了ROS驱动的使用指南,使得用户能够更好地集成和处理激光雷达数据。此外,还对RS232转TTL转接板的连线图及引脚定义进行了详细说明。
5. 安全与操作:用户手册强调了激光雷达的安装建议,包括走线注意事项、供电注意事项和安装支架的上下间距。同时,增加了激光安全等级的说明,确保用户在操作过程中遵循安全规范。
6. 故障诊断与排除:随着版本的迭代,手册逐渐增强了故障诊断部分,增加了故障排除章节和故障说明项,帮助用户快速识别并解决可能出现的问题。
7. 其他功能:手册还包含了PhaseLock(相位锁定)技术的介绍,增加了GPS输入状态标志位,以及对回波模式和反射率mode3的说明,这些都进一步提升了RS-LiDAR-16的性能和适用性。
RS-LiDAR-16用户手册是一个详尽的资源,不仅提供了产品硬件的详细信息,还涵盖了软件集成、数据处理和故障处理的全方位指导,对于用户来说是使用和维护RS-LiDAR-16不可或缺的参考资料。
118 浏览量
2022-01-02 上传
点击了解资源详情
2023-04-30 上传
2021-09-14 上传
点击了解资源详情
2019-09-12 上传
2018-09-26 上传

奔跑的Lunzi
- 粉丝: 442
- 资源: 370
 我的内容管理
展开
我的内容管理
展开







最新资源
- Dockin-RM:Dockin容器平台资源管理器是用于应用程序定义和容器实例管理的核心模块
- 基于java web工作流管理系统源码.rar
- mteguhpro.github.io:网站untuk Teguh
- MW2cdf:对于 n1 或 n2 >7 的 Mann-Whitney U 累积分布函数。-matlab开发
- 面包机
- signe:Clojure GUI实用程序。 该存储库已*弃用*,请参见mummi
- Naver Webtoon Comment Hider-crx插件
- Project-3-Code:控制机器人手臂将容器放置在Roomba型机器人上的计算机程序,该机器人会将容器转移到其垃圾箱中。 该项目是使用远程环境完成的(Quanser Labs)
- greensock的AS3缓动资源Tweenmax(亲测可用)
- css-mastery:Simon Collison,Andy Budd和Cameron Moll撰写的“ CSS Mastery”的源代码-css source code
- MW1cdf:对于 n1 和 n2 <=7,Mann-Whitney 的 U 累积分布函数。-matlab开发
- 信息安全技术标准 - 18份最新文件.7z
- 최강의군단 크롬 플러그인(다음)-crx插件
- temp-dev-scss:sassテンプレート
- JSPatch---comment:JSPatch是一个不错的hotfix框架,可利用js脚本修复网上的bug,但是作者bang没写注释,阅读源代码后,我添加了部分注释,想快速理解源码的同学可以参考
- 链家地产手机注册页面模板
