KUKA系统变量详解:软件8.6版
需积分: 0 192 浏览量
更新于2024-06-19
收藏 2.69MB PDF 举报
"KUKA System Variables for Software 8.6是库卡机器人的一份重要技术文档,专门针对KUKA机器人系统软件的8.6版本。这份手册详细介绍了KUKA机器人系统的系统变量,包括其用法、作用以及可能的配置。文档由KUKA Deutschland GmbH发布,日期为2022年6月1日,版权归属KUKA Deutschland GmbH。"
正文:
在机器人自动化领域,KUKA机器人以其高效、精确和灵活性而著称。系统变量在KUKA机器人的软件编程中扮演着核心角色,它们允许用户自定义机器人的行为、参数和工作流程。KUKA System Variables for Software 8.6提供的详细信息可以帮助程序员深入理解并优化机器人系统的运行。
系统变量可以分为不同类型,例如控制变量、状态变量、输入/输出变量等,每种类型都有其特定的用途。控制变量用于调整机器人的运动特性,如速度、加速度和路径规划;状态变量则反映机器人当前的工作状态,如关节角度、电机温度等;输入/输出变量处理机器人与其他设备之间的通信,实现数据交换。
在KUKA的8.6系统软件中,这些系统变量可能包括了新的特性和改进,以提升性能和兼容性。用户可以通过手册了解到如何定义、访问和修改这些变量,从而实现对机器人系统的精细控制。例如,通过设置特定的系统变量,可以优化机器人的运动性能,减少停机时间,提高生产效率。
文档中可能还包括了关于如何使用KUKA的编程环境(如KRL,KUKA Robot Language)来操作这些系统变量的示例代码和指导。对于开发人员来说,这些实例是理解和应用系统变量的关键。
需要注意的是,尽管KUKA已尽力确保文档的准确性,但由于技术的不断发展,控制器可能存在未在文档中描述的功能。这意味着在实际应用中,开发者可能需要根据实际情况进行探索和试验。同时,由于技术的更新,后续版本的文档可能会包含更多的修正和改进。
KUKA System Variables for Software 8.6手册是工程师和程序员的重要参考资料,它提供了详细的操作指南,帮助他们充分利用KUKA机器人系统的潜力,实现高效、精确的自动化任务。无论是进行基本的程序编写还是复杂的系统集成,该手册都将是一个不可或缺的工具。
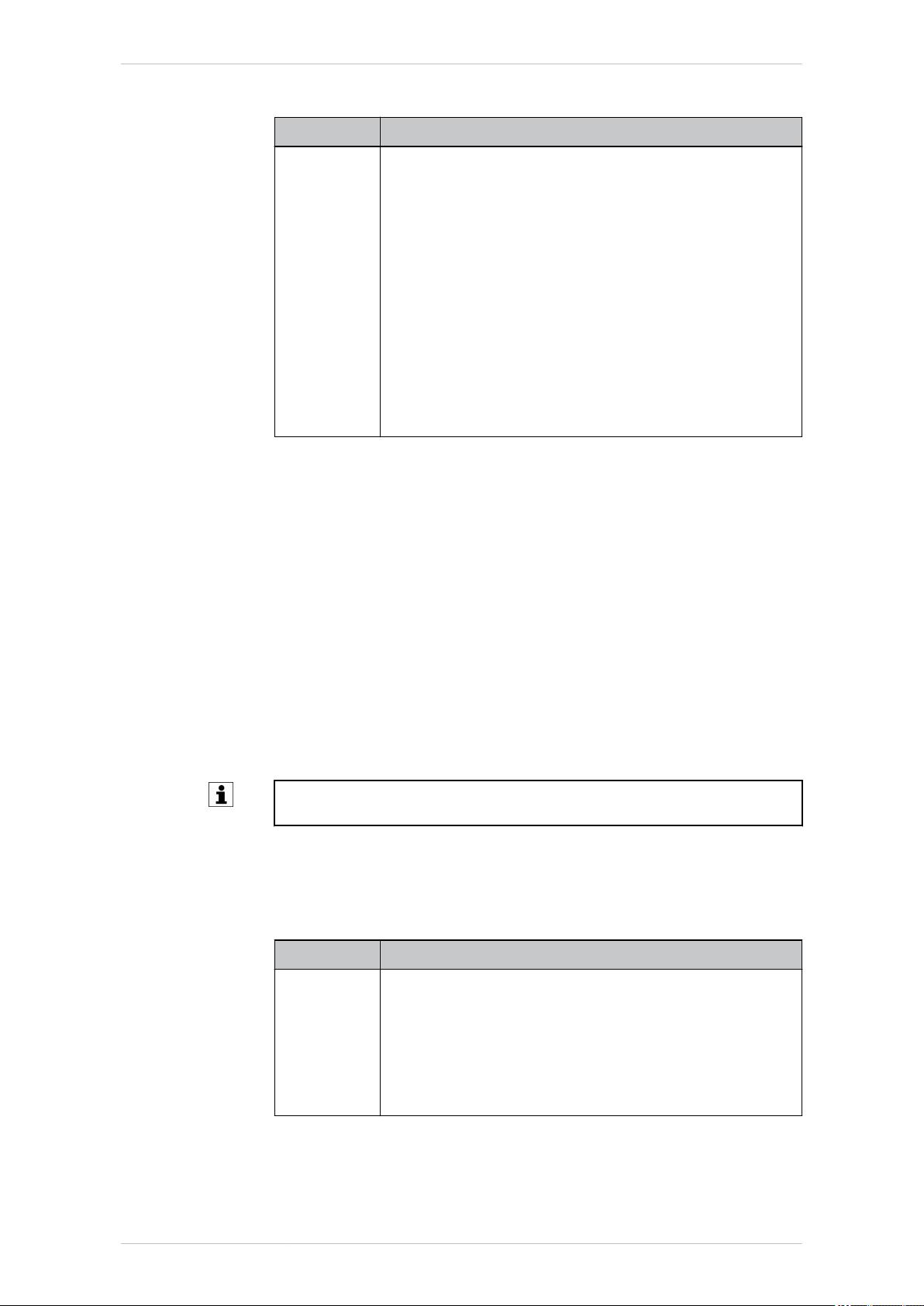
Explanation of the syntax
Element Description
state Type: ENUM ABS_ACCUR_STATE
• #ACTIVE: positionally accurate robot model is loaded
and is being used. A positionally accurate robot mod-
el is saved on the RDC. The variable $DEACTI-
VATE_ABS_ACCUR is FALSE.
• #INACTIVE: positionally accurate robot model is loa-
ded, but is not used. A positionally accurate robot
model is saved on the RDC, but it is currently deacti-
vated with $DEACTIVATE_ABS_ACCUR == TRUE
(until the next cold start of the robot controller).
• #NONE: standard robot model. No positionally accu-
rate robot model is used. No positionally accurate ro-
bot model is saved on the RDC. The value of the
variable $DEACTIVATE_ABS_ACCUR is irrelevant.
3.3 $ABS_CONVERT
Description
Conversion to positionally accurate Cartesian robot poses
The variable can be used to convert non-positionally accurate Cartesian
robot poses to positionally accurate ones. For example, Cartesian robot
poses in motion programs that were taught without a positionally accurate
robot model can be nominally converted to positionally accurate coordi-
nates and stored in the associated data list. For this purpose, the variable
$ABS_CONVERT is set to TRUE.
In physical terms, there is no change in the way the converted robot
poses are addressed. Bit 5 of the state specification indicates whether po-
sitionally accurate coordinates are stored for a point. If the bit is set (bit 5
= 1), the coordinates are positionally accurate and the point is not conver-
ted again.
It is advisable to set the variable $ABS_CONVERT to FALSE again as
soon as the Cartesian robot poses have been converted.
Syntax
$ABS_CONVERT = state
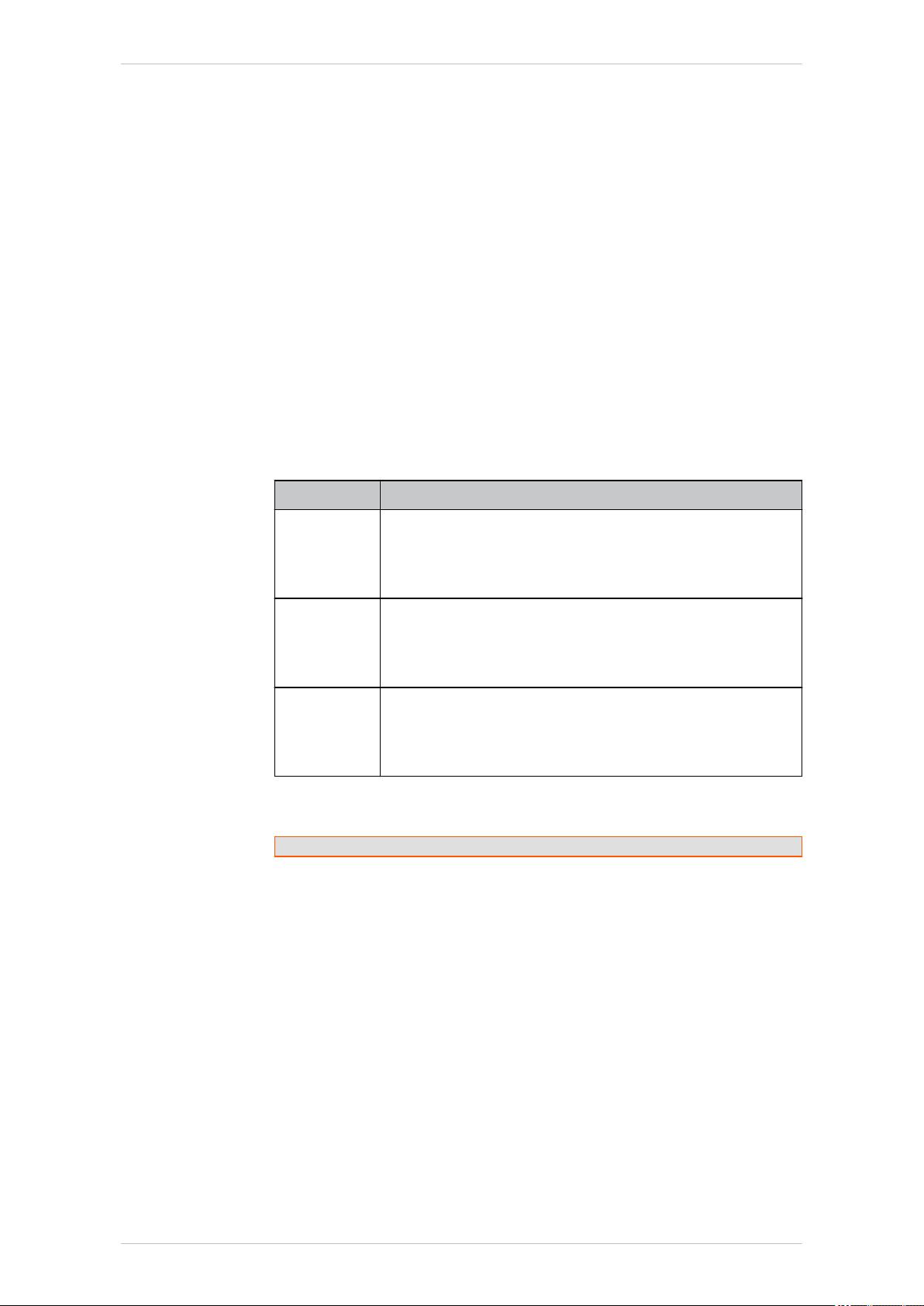
Explanation of the syntax
Element Description
state Type: BOOL
• TRUE: conversion to positionally accurate Cartesian
robot poses
• FALSE: no conversion to positionally accurate Carte-
sian robot poses
Default: FALSE
System Variables
16/238 | www.kuka.com KSS 8.6 System variables V1 | Issued: 01.06.2022
System variables
剩余237页未读,继续阅读
2023-11-21 上传
2023-11-21 上传
2024-10-03 上传
2024-04-03 上传
2024-04-03 上传
2020-04-29 上传
2021-10-03 上传

m0_62907587
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
