
1545-5971 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TDSC.2018.2812192, IEEE
Transactions on Dependable and Secure Computing
3
be similar, which is usually not the case for real fingerprints.
To deal with this issue, a more sophisticated orientation
model should be explored for artificial orientation generation.
Concretely, more parameters are needed in the model to create
the artificial orientation with more diversity.
People have proposed sophisticated models for estimating
orientation from a fingerprint image [24]–[26], where the
parameters are usually optimized based on the fingerprint
region in the image. The distributions and constraints of
these parameters for real fingerprints are yet to be explored.
Without such knowledge, it is difficult to randomly choose
a set of artificial parameters that can generate real-look alike
orientation. Thus, these models may not be suitable for the task
of artificial orientation generation. In this section, we propose
to generate the artificial orientation by a model combining
global orientation and local orientation. The global orientation
keeps the basic topology of different fingerprint classes, which
is computed directly from the zero-pole model [23]. The local
orientation describes the orientation around the singular point
area, which is computed by a local orientation model guided
by a few parameters. With the help of the local orientation,
we are able to generate diverse artificial orientation even if the
singular points are with similar locations.
Next, we explain the local orientation model and the
combined orientation model in detail. Since the range of
fingerprint orientation is defined within [0, π), there is an
inevitable discontinuity on π. As suggested in [20], [24],
representing the orientation in the complex domain would be a
possible solution for this problem. Given the orientation O, the
corresponding orientation in the complex domain is computed
as:
Z = cos(2O) + j sin(2O). (4)
On the other hand, O can be computed from Z by
O =
1
2
arg(Z). (5)
In the rest of this section, the orientation in the complex
domain is termed as the complex orientation for simplicity,
and all the points are located in the complex domain.
1) The local orientation model: The standard local orien-
tation can be generated using a point-charge model proposed
in [24], where the quantity of electricity is assumed to be
the same for the real and image part of the complex local
orientation. In order to generate diverse local orientation for
a singular point s = s
y
+ js
x
, we propose a weighted point-
charge model below:
Z
s
(z) =
−w
r
Re(z−s)+jw
i
Im(z−s)
v
if s ∈ cores
w
r
Re(z−s)+jw
i
Im(z−s)
v
if s ∈ deltas
, (6)
where Re(z) and Im(z) refer to the real and image part of
the complex number z, w
r
and w
i
are the weights (i.e., the
quantity of electricity) for the real and image part of z − s,
and v is the normalization scalar:
v =
w
2
r
Re
2
(z − s) + w
2
i
Im
2
(z − s). (7)
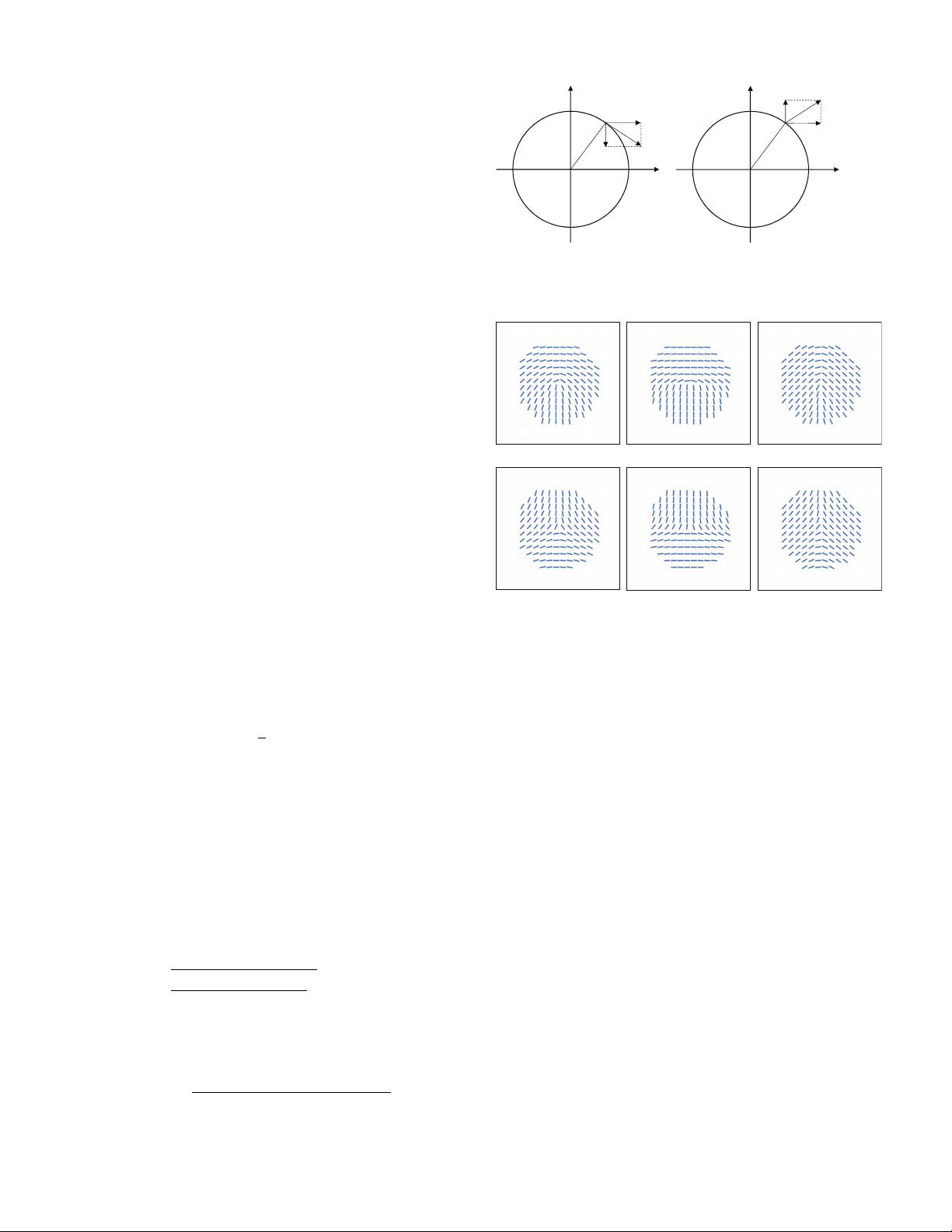
Fig. 2 illustrates the influence vector around a core and a delta
on an unit circle for the weighted point-charge model. With
s
x
y
.
z
w
i
Im(z
-
s)
-
w
r
Re(z
-
s)
Z
s
(z)
s
x
y
.
z
w
i
Im(z
-
s)
w
r
Re(z
-
s)
Z
s
(z)
Fig. 2. Illustration of the weighted point-charge model. Left: the influence
vector around a core, right: the influence vector around a delta.
(a)
(b)
Fig. 3. Local orientation generated for (a) a core and (b) a delta using
the weighed point-charge model. From left to right: w
r
= 1 and w
i
= 1;
w
r
= 0.9 and w
i
= 0.2; w
r
= 0.2 and w
i
= 0.9. The rotation angle θ
is set as 0 for all. Both the core point and the delta point are located at the
center.
different weights applied, the influence vector is no longer
tangent to the circle (for a core) or the radial of the circle (for
a delta).
We define the area with s as the central point and ϵ
s
as
the radius as the effective region for the singular point. By
taking the effective region and rotation into consideration, the
complex local orientation for s is further computed as
Z
s
′
(z) =
Z
s
(z
θ
) if d(z, s) ≤ ϵ
s
0 otherwise
, (8)
where z
θ
is the rotated version of point z with s as the
rotation center and θ as the rotation angle (please refer to
Eq. (1) for computing z
θ
), d(z, s) refers to the Euclidian
distance between point z and s. Fig. 3 illustrates some local
orientation generated using the weighted point-charge model.
It can be seen that such a model is able to produce diverse
local orientation by choosing different w
r
and w
i
.
2) The combined orientation model: We use the orienta-
tion computed from the zero-pole model [23] as the global
orientation, and denote its representation in complex domain
as Z
g
. We further denote the complex local orientation for the
ith singular point s
i
as Z
′
si
. The combined orientation model
剩余13页未读,继续阅读

weixin_38687277
- 粉丝: 10
- 资源: 949
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


