PID控制优化:小车爬坡模型与MATLAB仿真
"基于PID控制的小车爬坡模型的MATLAB仿真与参数优化"
在小车爬坡模型中,PID(比例-积分-微分)控制是一种广泛应用的控制策略,能够有效改善系统的动态性能。PID控制器通过调整比例(P),积分(I)和微分(D)三个部分的系数来实现对系统的精确控制。在这个模型中,我们关注的是如何通过PID参数的调整,提高小车在坡道上的加速性能。
首先,建立汽车爬坡的物理模型是关键。汽车在坡度为α的坡路上行驶时,会受到空气阻力、牵引力、重力分量以及摩擦力的作用。这些力的平衡方程可以简化为二阶动态系统,通过拉普拉斯变换转化为传递函数形式。传递函数描述了输入(如控制信号)与输出(如车速)之间的关系。
在MATLAB中,我们可以用`tf`函数创建传递函数模型,并通过`step`函数观察系统的阶跃响应。在初始设定下,汽车在开环控制状态下,速度达到稳定状态所需的时间较长,表明系统响应较慢。
为提升控制性能,引入PID算法。PID控制器的传递函数包括比例项、积分项和微分项,它们共同决定了控制器的响应特性。通过调整这三个系数,我们可以改善系统的响应速度、超调和稳定时间。
在仿真过程中,通常采用试错法或Ziegler-Nichols法则来选择PID参数。例如,首先固定积分和微分系数,改变比例系数,观察系统响应变化,找出最佳的比例系数。接着,再固定比例系数,调整积分系数,最后考虑微分系数。每个参数的调整都会影响系统的上升时间、峰值时间和稳态误差。
在MATLAB中,可以通过循环遍历不同的PID参数组合,观察并分析系统响应,从而找到一组能提供满意性能的参数。这个过程可能需要多次迭代,以确保在各种工况下(如汽车质量变化、摩擦系数不同、坡角变化等)系统都能保持良好的控制性能。
在实际应用中,除了基本的PID控制,还可以考虑引入自适应控制、滑模控制等高级控制策略,以应对环境和车辆状态的不确定性。同时,对于更复杂的系统,可能需要使用模型预测控制或者神经网络控制等现代控制理论,以进一步提升控制性能。
PID控制在小车爬坡模型中的应用是一个涉及到物理建模、系统分析、控制理论和MATLAB仿真的综合过程。通过深入理解和巧妙调整PID参数,可以有效地改善小车在坡道上的行驶性能。
0 5 10 15 20 25 30 35
0
2
4
6
8
10
12
14
16
18
20
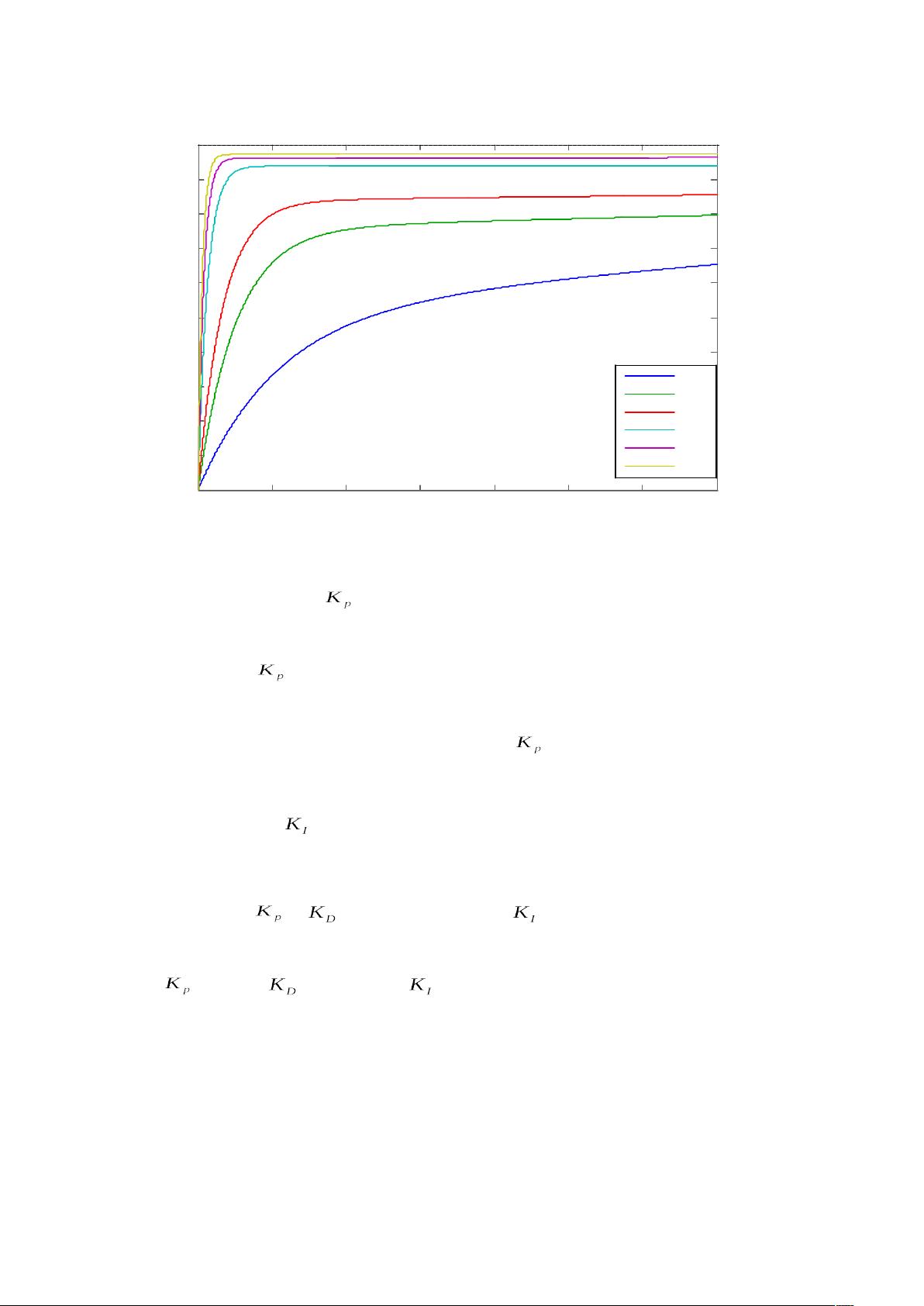
比例系数的大小对控制系统的影响
(sec)时间
m/s速 度 ( )
50
150
250
750
1250
1750
由上图可以看到, 越大,小车达到稳定速度所用的时间最小,所以在一
定范围内增大 可有效改善小车的控制效果,但是不论如何增大比例系数都
无法消除系统中存在的净差。在后续研究中取 *。
(&)积分系数 的选择
通过固定 、 参数,研究积分系数 的大小对控制效果的影响。故
令 * , ,分别取 、 、 、: 、 、& , 在
+ 中编写如下程序:
*/0&
.1&1:.&11&...&
23-..145.
图 比例系数的大小对控制系统的影响
剩余23页未读,继续阅读
2019-12-09 上传
2023-04-18 上传
2019-03-23 上传
2020-10-24 上传
200 浏览量
2024-10-07 上传
2023-10-23 上传

冰侠道
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索数据转换实验平台在设备装置中的应用
- 使用git-log-to-tikz.py将Git日志转换为TIKZ图形
- 小栗子源码2.9.3版本发布
- 使用Tinder-Hack-Client实现Tinder API交互
- Android Studio新模板:个性化Material Design导航抽屉
- React API分页模块:数据获取与页面管理
- C语言实现顺序表的动态分配方法
- 光催化分解水产氢固溶体催化剂制备技术揭秘
- VS2013环境下tinyxml库的32位与64位编译指南
- 网易云歌词情感分析系统实现与架构
- React应用展示GitHub用户详细信息及项目分析
- LayUI2.1.6帮助文档API功能详解
- 全栈开发实现的chatgpt应用可打包小程序/H5/App
- C++实现顺序表的动态内存分配技术
- Java制作水果格斗游戏:策略与随机性的结合
- 基于若依框架的后台管理系统开发实例解析
